Bluetooth Direction Finding
Direction Finding was introduced with Bluetooth 5.1 in 2019. It uses Angle of Arrival (AoA) and Angle of Departure (AoD) to determine location to sub-meter accuracy. There are many scenarios that require accurate tracking of assets and people. Logistics can ensure efficient use of equipment and improve workflows. Manufacturing can locate valuable plant tools, parts and sub-assemblies, improve safety and enable efficient asset allocation. Healthcare can track high value equipment, monitor the location of medicines, save time searching for equipment and monitor vulnerable patients. Facilities can track valuable assets, monitor lone workers, check occupancy levels and automatically locate people or students for safety and evacuation.
AoA uses multiple antennas at the receiver and AoD uses multiple antennas at the sender. AoA is more suitable for asset tracking because the sender can be a simple, inexpensive, beacon and complexity is constrained to the receivers, called locators. AoD is more suitable for where-am-I, navigation type scenarios where the multiple antenna senders are fixed. The popularity of asset tracking has resulted in initial products being based on AoA rather than AoD.
AoA beacons transmit special advertising containing a Constant Tone Extension (CTE) for a long enough time to enable the receiver to switch between all the antennas.
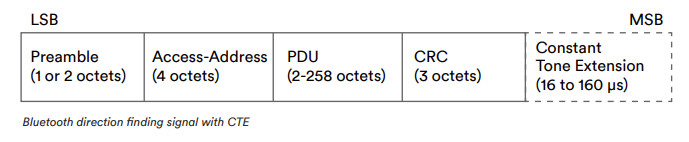
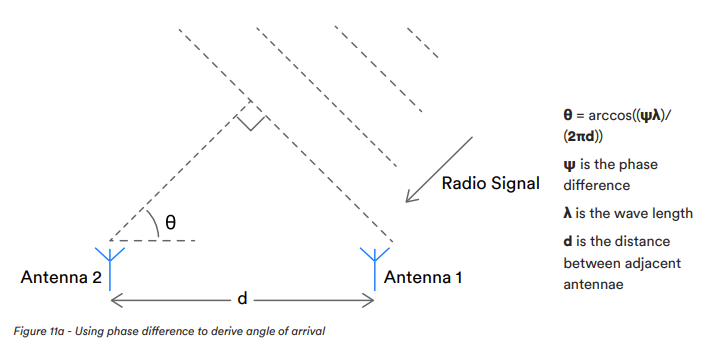
The differences in phase of the signal arriving from a beacon to each antenna are used to determine the direction.
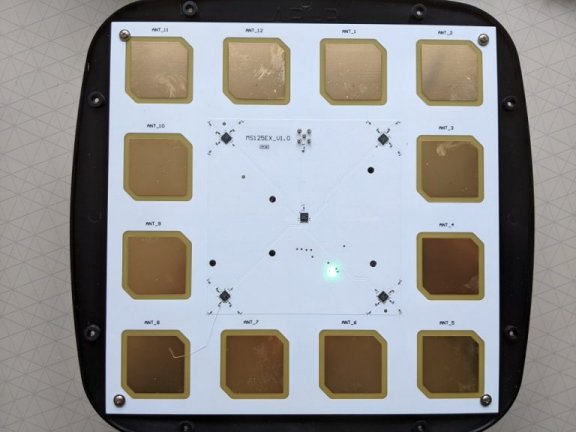
In practice, more than two antennas are required to obtain an accurate and stable location. Most current products use a standard design consisting of twelve antennas etched onto a printed circuit board.
The calculation of data from the antennas to angles is called radiogoniometry. The maths is complex and processing slow when many antennas are used. Advanced radiogoniometry techniques are used in a location engine to obtain the azimuth and elevation of the beacon. The location engine also uses triangulation to combine the azimuth and elevation from multiple locators into 3D space.
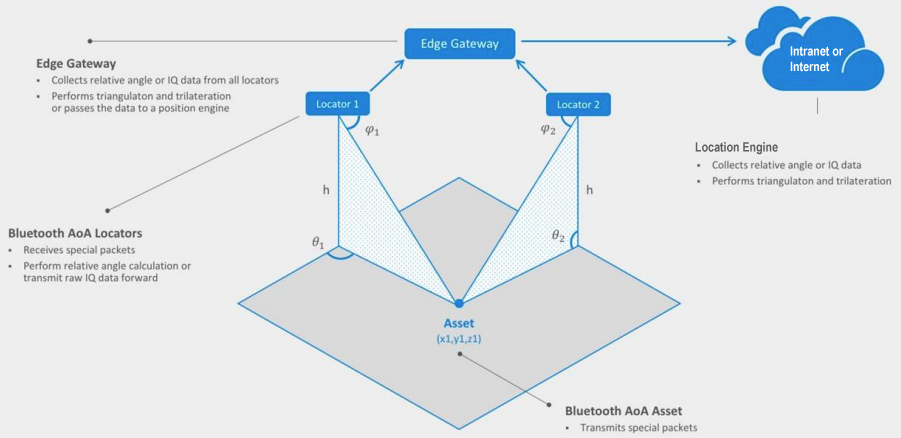
It's also necessary to filter the incoming data to mitigate the affects of multi-path reception, polarization, signal spread delays, jitter, and noise. The location engine needs to be very fast to support the maximum throughput and hence the maximum number of beacons.
Direction Finding Beacons and Gateways