There’s new research by Umair Mujtaba Qureshi, Zuneera Umair and Gerhard Petrus Hancke of the Department of Computer Science, City University of Hong Kong on Evaluating the Implications of Varying Bluetooth Low Energy (BLE) Transmission Power Levels on Wireless Indoor Localization Accuracy and Precision. The paper takes a deep look into the relationship between transmitted power and signal stability. It also looks at ways of filtering received signal strength (RSSI) data to improve the location accuracy.
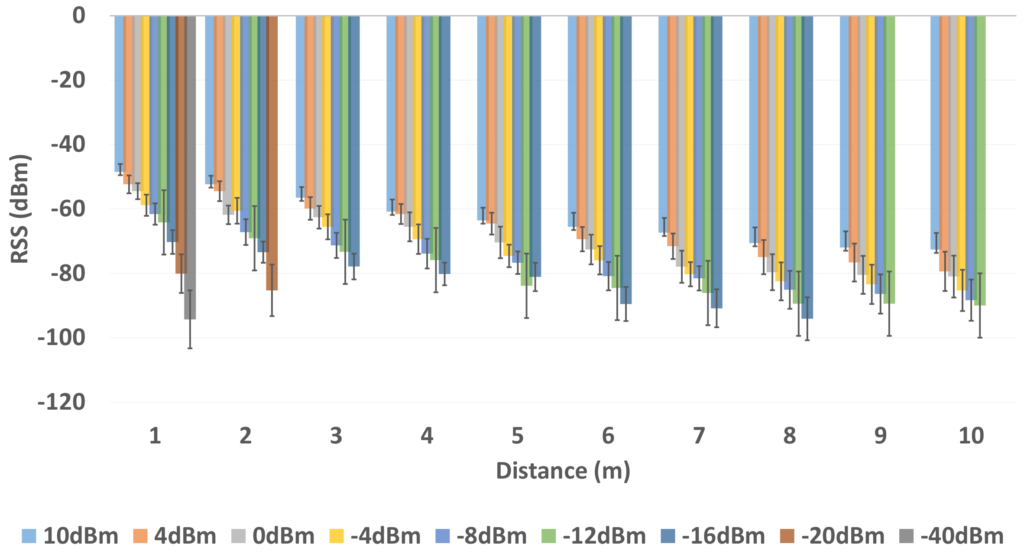
The main insight is that along with the expected difference in the RSSI attenuation there is a considerable difference in the BLE signal variation at all transmission power levels with respect to distance. The variation increases and the localisation accuracy decreases from high to low transmission power levels:
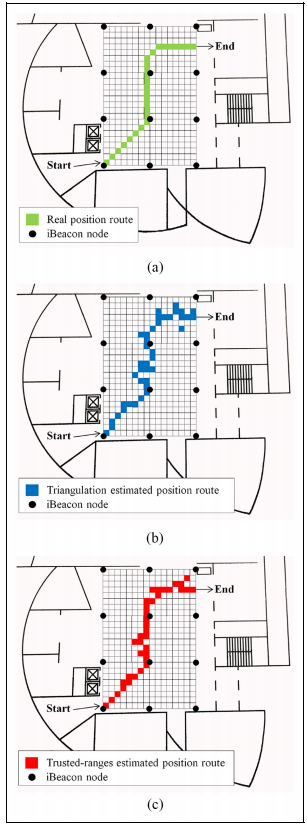
Another observation is that outliers in the data tend to affect the localisation accuracy. Applying filters to the data, they achieved a location accuracy of 2.2 meters with a precision of 95%.
One comment we have is that the researchers didn’t try different beacons. As we mentioned in 2016, the RSSI stability also varies across different beacon models.
Need more help? Consider a Feasibility Study.