A new paper presents Bridge, a system designed to extend Bluetooth Low Energy direction finding to all Bluetooth devices, including those that do not natively support the feature. Direction finding, introduced in BLE version 5.1, enables angle of arrival estimation using specialised packet structures and antenna arrays, allowing decimetre-level localisation accuracy. However, the majority of existing Bluetooth devices lack support for this capability, and upgrading hardware or firmware at scale is impractical. Bridge addresses this gap by enabling backward compatibility without modifying existing locators or target devices .
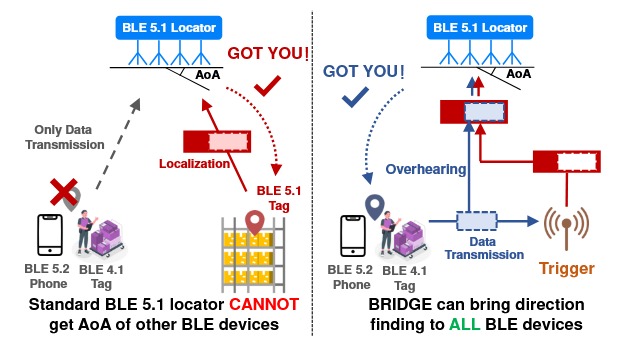
The core idea behind Bridge is the introduction of an additional node, called the Trigger, which acts as an intermediary between standard BLE 5.1 locators and unsupported Bluetooth targets. The Trigger simultaneously imitates a direction-finding-capable tag to the locator while maintaining a normal Bluetooth connection with the target. It achieves this through a carefully designed nesting packet that embeds multiple packet payloads into a single transmission while remaining compliant with the BLE bitstream and error-checking process. This allows the locator to receive valid direction finding information while partially sampling the target’s signal during the constant tone extension period, a process referred to as overhearing.
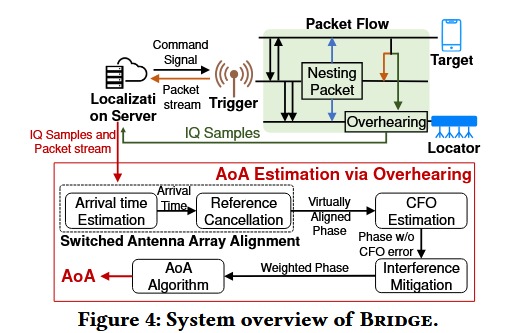
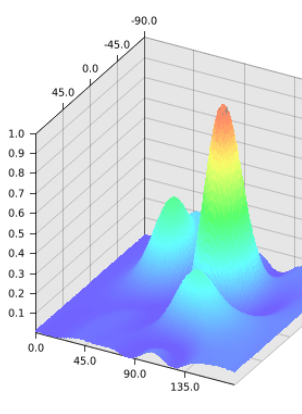
Because overhearing differs fundamentally from standard direction finding, the authors develop new signal processing techniques to recover accurate angle information. These include precise arrival time estimation using dynamic amplitude thresholds and differential phase correlation, virtual reference generation to cancel signal content effects, a two-stage carrier frequency offset estimation method to cope with partial reference periods, and interference mitigation through antenna-level combination and adaptive sampling control. Together, these methods enable robust angle estimation despite timing uncertainty, non-constant signal phases and environmental interference.
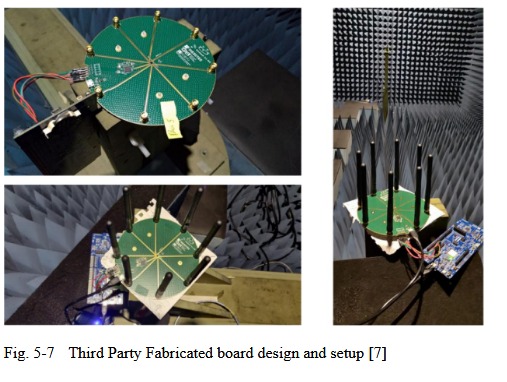
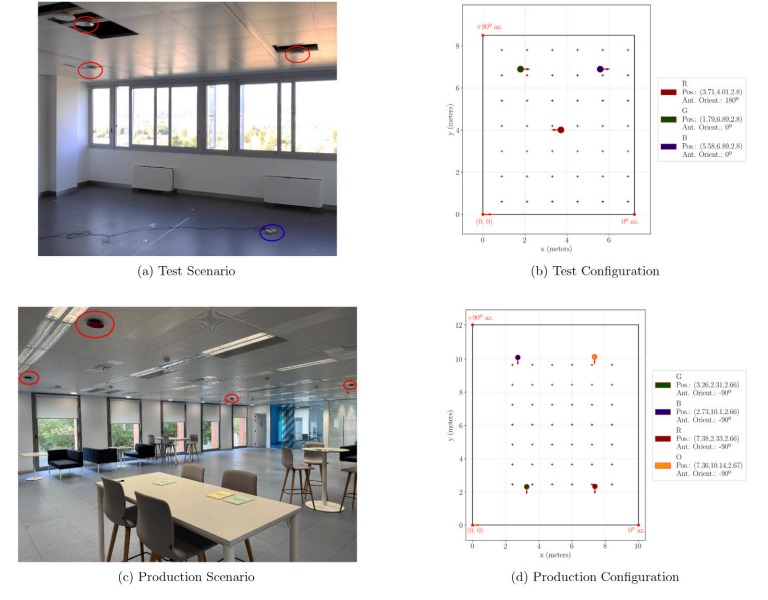
The system is implemented using commercial hardware and evaluated in a real indoor environment with ten different Bluetooth devices spanning versions 4.0 to 5.3. Experimental results show that Bridge achieves an average localisation error of around 33.4 centimetres, close to that of standard BLE 5.1 direction finding and substantially better than RSSI-based approaches.