Many people inquire about adjusting the transmission distance of a beacon. They often wish to either conserve battery or restrict the range at which a beacon is detectable.
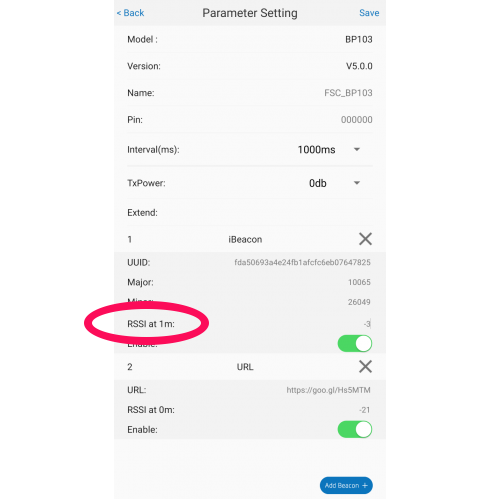
While some third-party platforms and SDKs offer distance settings, it’s a misconception to think you can directly set the distance. What you’re actually adjusting is the transmission power, which in turn influences the transmission distance. But since this involves radio waves, which are prone to reflections and interference, it’s impossible to guarantee that a specific power will equate to a precise distance.
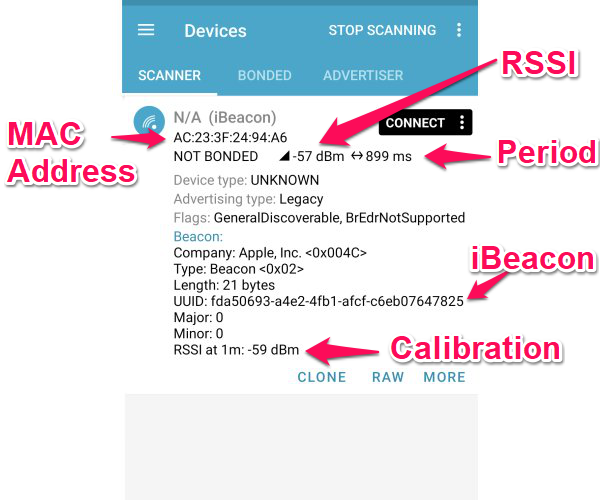
When using an app to detect beacons, you can employ the Received Signal Strength Indicator (RSSI) to focus on those within a desired range. However, it’s challenging to precisely correlate RSSI with the actual distance.
Some wonder if they can set the distance in terms of centimetres, similar to NFC. Typically, this isn’t feasible because even at their lowest power setting, most beacons transmit over a distance of about a metre.
Rather than asking if the transmitter’s distance can be minimised, it might be more practical to configure the receiver to disregard detections from further away. By using the RSSI value on the receiving app or another receiving Bluetooth scanning device, you can filter out distant beacons. Specifically, you can dismiss detections with an RSSI below a certain threshold, allowing you to focus on detections within a centimetre range. However, even this will not be that precise.
We have an article on Choosing the Transmitted Power.