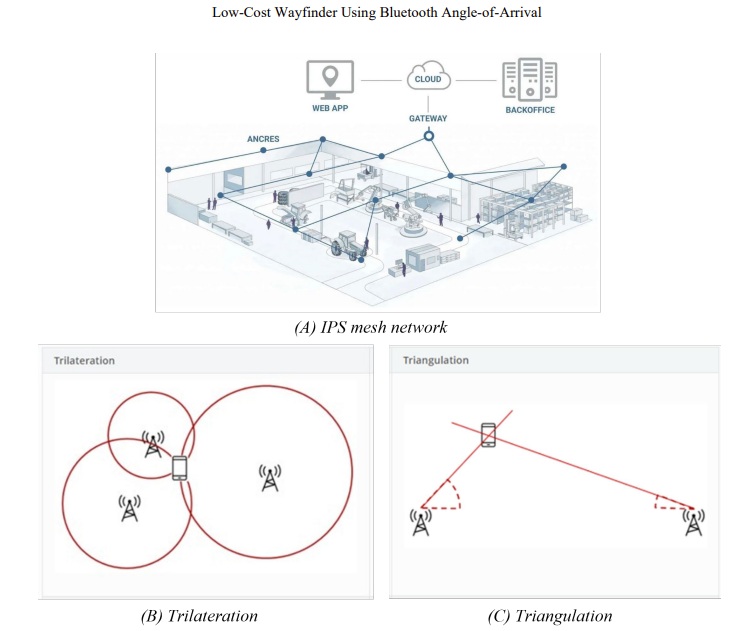
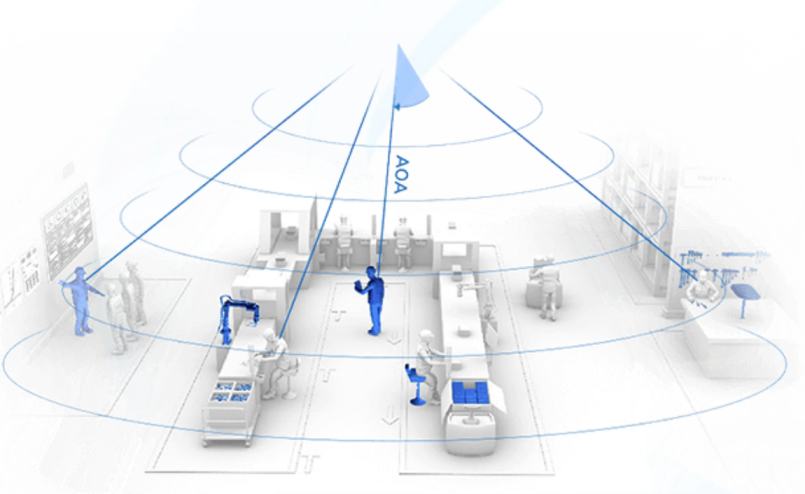
Bluetooth Low Energy direction-finding is becoming an important technology for indoor positioning. In factories, warehouses, offices and retail spaces, it can help locate tools, equipment, staff or customers without relying on cameras or other intrusive sensing systems. Yet one familiar problem still limits its accuracy: signals do not always travel directly from the transmitter to the receiver.
When there is a clear line of sight, Bluetooth angle-of-arrival measurements can be much more reliable. In real indoor environments, however, walls, furniture, metal structures and other obstacles can block or reflect the signal. These non-line-of-sight conditions create multipath effects, where the receiver picks up scattered reflections rather than the direct signal. That can bias the estimated direction and make the final location estimate less trustworthy.
A new study introduces a lightweight machine-learning approach designed to detect when Bluetooth measurements are likely to be unreliable. Rather than trying to fix every distorted signal, the system follows an “identify and discard” strategy. It classifies incoming measurements as line-of-sight or non-line-of-sight, allowing a positioning engine to ignore or down-weight the signals most likely to reduce accuracy.
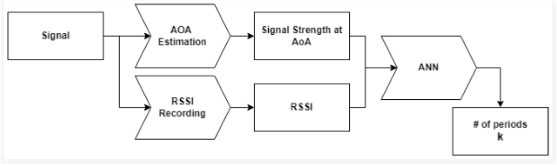
A key part of the work is that it focuses on Bluetooth-native data. Many existing line-of-sight detection techniques are built for ultra-wideband or cellular systems, where richer channel measurements are available. Bluetooth direction-finding operates under tighter bandwidth and hardware constraints, so the researchers instead use Constant Tone Extension in-phase and quadrature data, known as CTE IQ features. These are the kinds of measurements already available in BLE angle-of-arrival systems, making the approach more practical for real deployments.

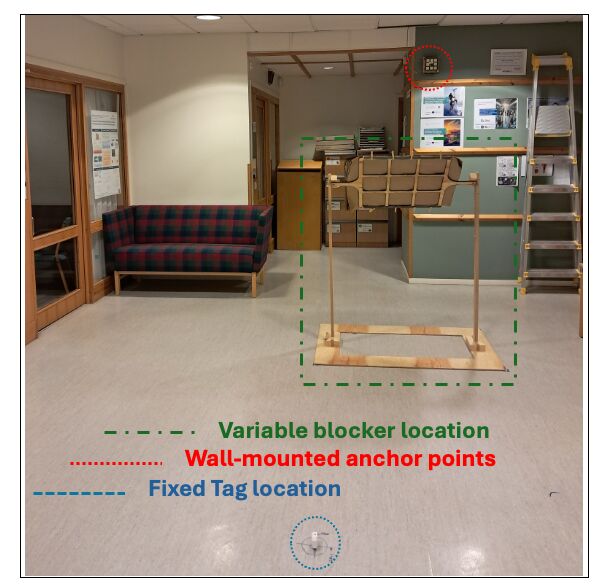
To test the idea, the researchers collected labelled Bluetooth measurements in two indoor environments using a u-blox direction-finding development kit. They created both line-of-sight and non-line-of-sight conditions, including the use of a blocker to remove the direct signal path and force the receiver to rely on reflected or scattered signals. This produced controlled datasets that could be used to train and compare different machine-learning models.
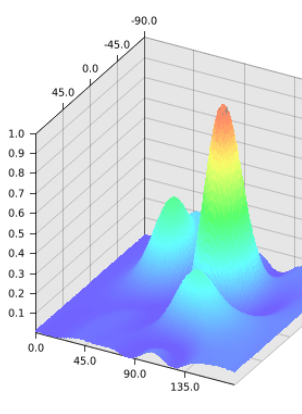
The proposed pipeline starts with robust preprocessing to reduce the influence of outliers, which are common in reflected indoor radio signals. The researchers then use principal component analysis to study how line-of-sight and non-line-of-sight measurements differ statistically. Adaptive kernel density estimation helps reveal that non-line-of-sight data often has heavier tails and more irregular spread, especially in higher-dimensional feature spaces.
For classification, the paper compares several approaches, including support vector classifiers, random forests and a small multilayer perceptron. The central contribution is the use of Nyström kernel approximation, which creates a compact nonlinear feature representation without the full computational cost of traditional kernel methods. This matters because Bluetooth positioning systems are often expected to run on embedded devices with limited memory, processing power and latency budgets.
The findings suggest that reliable indoor Bluetooth positioning does not necessarily require heavy machine-learning models or expensive hardware. By designing features around the specific characteristics of BLE direction-finding signals, it is possible to build a practical detector that can flag poor-quality measurements before they damage the final position estimate.
This work is especially relevant for industrial and commercial environments where indoor positioning needs to be robust, affordable and scalable. In the future, this type of line-of-sight detection could be integrated directly into Bluetooth positioning engines, allowing systems to assign confidence scores to angle measurements and make smarter triangulation decisions.
The broader message is simple. Better Bluetooth positioning may depend not only on estimating where a signal comes from, but also on knowing when that signal should not be trusted.