We sometimes get asked whether a beacon is faulty because a customer is seeing a lot of fluctuation in the Received Signal Strength Indicator (RSSI) values given by smartphones or gateways seeing beacons, even in a seemingly stable environment and with no change in distance. The short answer is: this is normal. The reason for this lies in the complex nature of radio signals and how they interact with the environment.
Radio signals are susceptible to a variety of factors that can affect their received strength. When a beacon sends out a signal, it doesn’t just travel in a straight line to the receiver. Instead, it disperses in multiple directions and can bounce off walls, floors and other objects.
Reflections can cause the signal to take different paths before reaching the receiver. Each path can have a different length and, therefore, a different time delay. This results in a phenomenon known as multipath fading, where multiple copies of the signal arrive at the receiver at slightly different times. This can cause fluctuations in the RSSI values you observe.
While reflections are a primary cause of RSSI fluctuation, they are not the only one. Other physical changes in the environment can also contribute to this variability. For example, the presence of people moving around can affect the signal, as the human body is mostly water and can absorb radio frequencies. Similarly, other electronic devices emitting radio frequencies can interfere with the signal, causing further fluctuations.
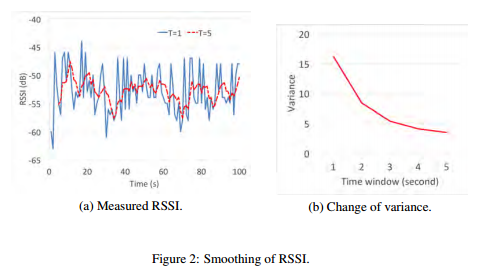
To get a more accurate understanding of the signal strength, it’s advisable not to rely on a single RSSI value. Instead, you should look at many RSSI values over a period of time and calculate the average. This approach helps to mitigate the effects of temporary fluctuations and provides a more stable and reliable measure of signal strength.
Many people, particularly researchers, have looked into the intricacies of RSSI and its variability. Various algorithms and methods have been developed to improve the accuracy of RSSI-based distance estimation and location tracking. For those interested in a deeper understanding or potential solutions to this issue, we recommend looking at the articles tagged RSSI and RSSIStability on our blog.