Customers often ask us the accuracy when locating beacons. In order to get the answer, its necessary to understand different ways of locating and the tradeoffs that are needed to get the different levels of accuracy.
There are two types of locating, received signal strength (RSSI) based and angle of arrival direction finding (AoA).
Locating using RSSI
There are two main scenarios. The first is a where the detector, usually a phone or gateway, is at a known location and the beacon moves. The second is where the beacons are fixed and the detector moves. Either way, the detector receives a unique beacon id and the receiving electronic circuitry provides the strength of the received signal.
The value of the RSSI can be used to infer the distance from the detector to the beacon. The main problem with RSSI is that it varies too much, over time, to be used to accurately calculate distance. The direction also isn’t known when there’s only one beacon and one detector. The varying RSSI, even when nothing is moving, is caused by the Bluetooth radio signals that are reflected, deflected by physical obstacles and interfered with by other devices using similar radio frequencies. Physical factors such as the room, the beacon not uniformly emitting across a range of 360 degrees, walls, other items or even people can affect the received signal strength. How the user holds a detecting phone can affect the effectiveness of the antenna which in turn affects the signal strength.
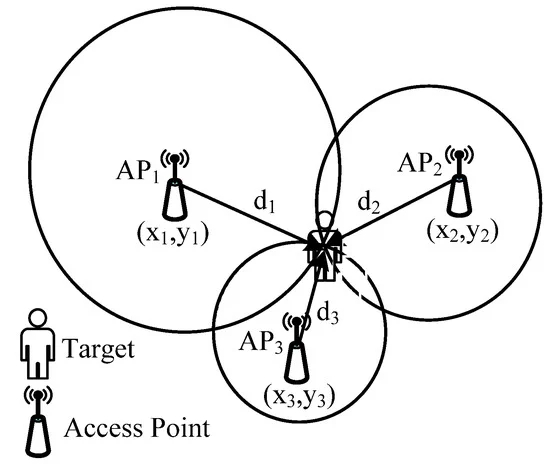
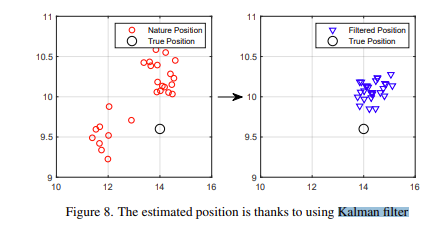
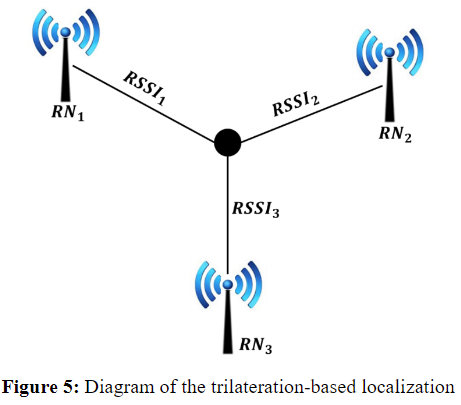
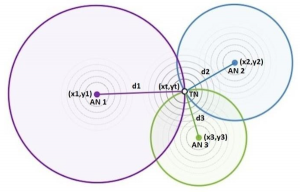
The varying RSSI can be smoothed by averaging or signal processing, such as Kalman filtering, to process multiple RSSI values over time. The direction not being known can be solved by using trilateration where three gateways (or beacons depending on the above mentioned scenario) are used to determine the distance from three directions and hence determine the 2D location.
Trilateration
The aforementioned physical factors that affect RSSI can be reduced by measuring the actual RSSI at specific locations and hence calibrating the system.
The change of RSSI with distance is greater when the beacon is near the detector. At the outer reaches of the beacon signal, the RSSI varies very little with distance and it’s difficult to know whether the variance is due to a change of distance or radio noise. Hence for systems that use signal processing, trilateration and calibration tend to achieve accuracies of about 1.5m within a shorter range confined space and 5m at the longer distances.
However, such systems have problems. The multiple RSSI values needed for averaging or signal processing mean that you either have to wait a while to get a location fix or have the beacons transmit more often (with a shorter period) that flattens their batteries much sooner. Trilateration requires at least three devices per zone so can be costly and require significant time to setup and maintain. Using calibration is like tuning a performance car. It works well until something small changes and it needs re-tuning. If someone adds a room partition, desk or even something as simple as lots of people in the room, the calibration values become invaid. Re-calibration takes human effort and, pertinently, it’s not always easy to know when it needs re-tuning.
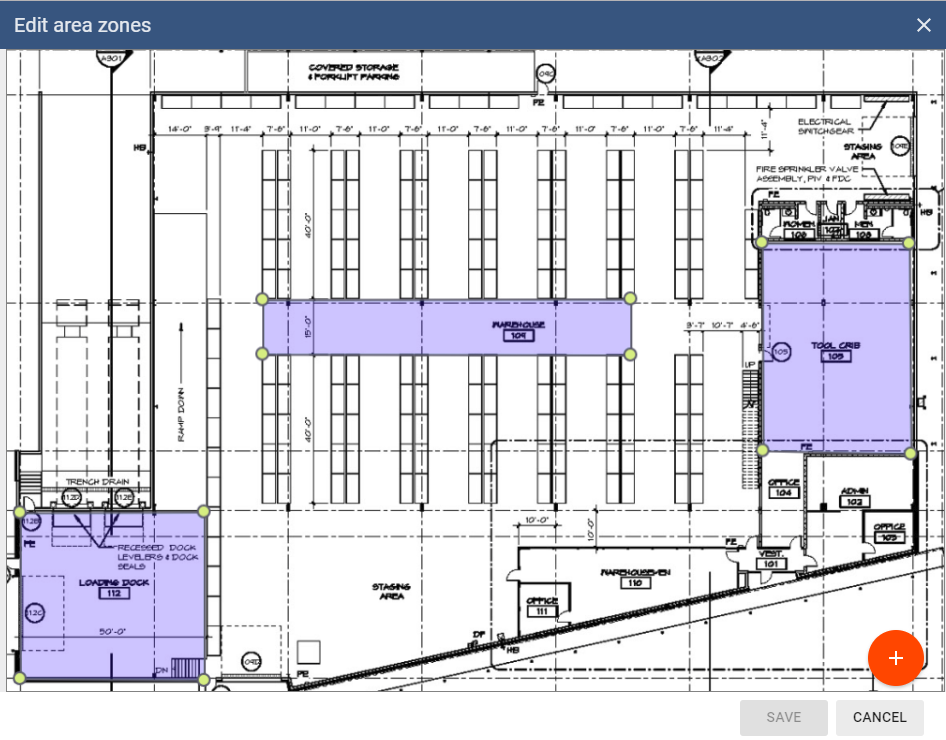
An alternative to trilateration is zoning. This involves putting a detector (or beacon depending on the above mentioned scenario) in each room or zone. The system works out the nearest detector or beacon and can work on just one RSSI value to get a fix quickly. The nearest zone is often all that’s required of most implementations. With zoning, if you need more accuracy in a particular zone you add more detectors in the area to get up to the 1.5m accuracy of other methods. This will obviously be impractical if you need 1.5m accuracy everywhere over a large area.
BeaconRTLS™ area zones
Angle of Arrival Locating
An alternative to trilateration and zoning is more expensive Bluetooth hardware and more complex software that makes use of Angle of Arrival (AoA). Locator hardware with multiple antennas uses Bluetooth Direction Finding to find assets to better than 1m accuracy. Location engine software uses the difference in the time of receiving the signals at multiple antennas to calculate the position. Multiple locators can also be used to cover larger areas and/or improve the accuracy using triangulation.
Unlike RSSI systems where any beacons can be used, locators tend to be tied to using the same manufacturers’ beacons. The complex hardware and software has less throughput and supports fewer beacons. The computing hardware needs to be more powerful. Systems need careful, accurate site measurements to achieve good accuracy.
Summary
Choosing a solution just because it is more accurate, rather than needed, will cost significantly more not just in hardware but in software cost, setup effort and maintenance. Work out what accuracy you need and then seek out an appropriate solution.