A Bluetooth–Wi-Fi gateway is a device that links Bluetooth devices to a Wi-Fi network. It enables Bluetooth equipment such as sensors, beacons and other IoT devices to communicate over Wi-Fi and exchange data with other devices on the local network, with remote servers or with cloud services.
These gateways contain both Bluetooth and Wi-Fi radios and act as a bridge between the two technologies. They are widely used in Internet of Things (IoT) applications, where they provide a simple way to bring a wide range of Bluetooth devices onto an existing Wi-Fi network so they can interoperate and share data.
Configuration is typically carried out through web pages hosted on the gateway itself. From these pages you can configure the Wi-Fi access point that the gateway connects to, specify the destination server (often using protocols such as HTTP or MQTT) and define which Bluetooth devices are permitted to have their data relayed. The configuration usually includes filtering options, allowing you to manage data sources based on Bluetooth advertising data and/or Bluetooth MAC address. Power for the gateway is generally supplied via a USB connection, which is used purely for power and not for data transfer.
In addition to Wi-Fi models, there are also gateways that connect to the network via Ethernet rather than wireless connectivity, providing a wired alternative for more throughput or better reliability.
When it comes to wireless connectivity, Bluetooth and WiFi are two of the most widely used technologies. While they serve different purposes, they share some similarities in terms of range and frequency usage. Typically, Bluetooth has similar range as WiFi. Standard Bluetooth connections and WiFi can reach up to 50 meters depending on reflection and blocking.
While standard Bluetooth and WiFi devices have limited ranges, there are special Bluetooth beacons designed for extended range capabilities. These beacons can achieve ranges that surpass typical WiFi connections, sometimes reaching up to 4Km. This extended range is achieved through the use of higher power outputs and additional signal amplifiers. However, it’s important to note that the more extreme long-range beacons are specialised devices requiring power via USB rather than battery and are not representative of typical Bluetooth functionality.
Bluetooth 5 brought significant improvements to the technology, including the potential for extended range. Theoretically, Bluetooth 5 can achieve ranges up to four times that of previous versions in ideal conditions. However, it’s important to understand that most Bluetooth beacons, even those supporting Bluetooth 5, don’t usually utilise these extended range capabilities. This limitation is primarily due to compatibility issues with smartphones.
Most smartphones on the market today don’t support the long-range features of Bluetooth 5. As a result, beacon manufacturers often choose not to implement these extended range capabilities to ensure their devices remain compatible with the widest range of smartphones possible. This decision prioritises broad compatibility over the potential for increased range.
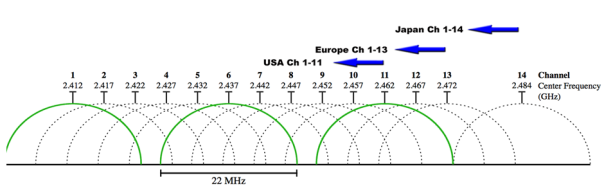
As Bluetooth and WiFi both use the 2.4GHz band, is it possible that they can interfere with one another? John-Paul Little has a old post on Can iBeacon deployments cause WI-FI interference. The conclusion is no, it won’t, as there’s negligible overlap between the WiFi and Beacon frequencies:
The 2.4GHz band is split into smaller frequencies, called channels, such that more than one technology can share the same band.
Also, at the practical level, we have used WiFi and (many) Beacons together on many projects and we have never experienced a problem. Although still rare, it’s more likely that multiple Bluetooth devices can interfere.
We have limited quantities of the new INGICS iGS03W Bluetooth WiFi gateway in stock.
The iGS03W listens for beacons, gets their advertising data and forwards it on to your server or an IoT server via TCP, HTTP(S) or MQTT including AWS IoT, Google Cloud IoT and Azure IoT Hub.
It differs from the iGS01S in that it supports greater throughput, Bluetooth 5 Long Range mode (LE Coded PHY) and also includes a wall holder.
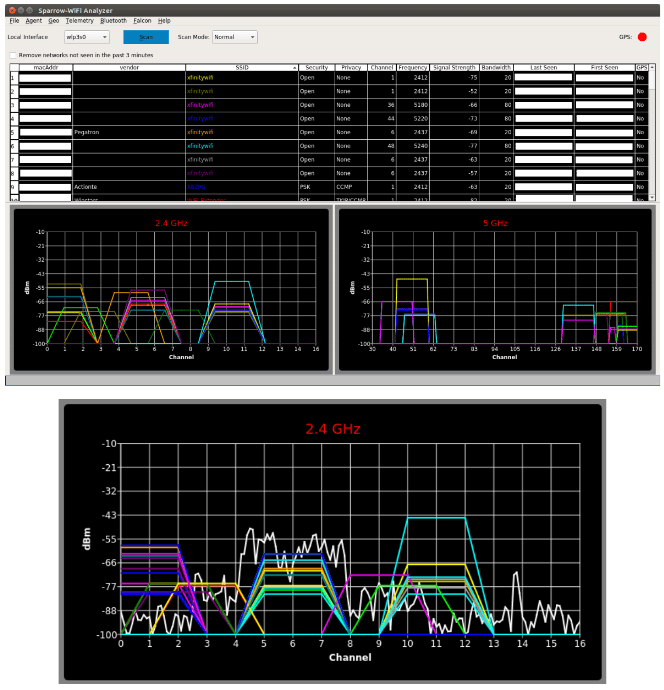
Most of the time Bluetooth ‘just works’. However, if you need to diagnose interference problems or do site surveys then you will need a wireless spectrum analyser. Sparrow-WiFi is a spectrum analyser for Linux:
WiFi access points are increasingly supporting the broadcast of Bluetooth beacon signals. The main usecase is to allow for smartphone apps to detect the Bluetooth advertising and provide for location based information and navigation.
There are also some interesting uses in retail that automatically provision smartphone WiFi access settings based on the detected presence of a beacon.
There are a number of solutions and retail situations where beacons are used to connect the smartphone user to WiFi. How does this work?
Beacons only provide a known unique id for a place. An app on the smartphone sees that id and knows, usually via some central database, the WiFi connection settings. The app uses those settings to programmatically set up the WiFi connection.
There’s obviously a chicken and egg situation here as the app needs the WiFi connection (or cellular) to access the central database of beacon ids vs WiFi settings. The mechanism doesn’t work when cellular connections are slow, poor or the user, perhaps a tourist, has turned off roaming to save costs.
For more reliable operation of the mechanism, the app can choose to fetch and cache nearby/popular beacons vs WiFi combinations, ahead of time, when it does have Internet connectivity.
Connected factory implementations require a large number of connected assets for condition-based monitoring, asset tracking, inventory (stock) management or for building automation. Bluetooth is a secure, low cost, low power and reliable solution suitable for use in connected factories. In this post, we examine the reasoning behind some out-of-date thinking on industrial wireless, uncover the real problems in factories and provide some explanations how Bluetooth overcomes these challenges.
Operations teams are usually very sceptical about industrial wireless. They have usually tried proprietary industry solutions using wireless with mixed results. They might have experienced how connections, such as WiFi, can become unreliable in the more electrically noisy areas of factories. The usual approach is to use cable. However, this can become expensive and time consuming. Using cable isn’t possible when assets are moving and becomes impractical when the number of connected items becomes large as in the case of connected factories. As we shall explain, Bluetooth is intrinsically more reliable than WiFi even through they share the same 2.4GHz frequency band.
There’s usually lots of electrical noise in an industrial environment that tends to be one of two types:
Electromagnetic radiation emitted by equipment. This typically includes engines, charging devices, frequency converters, power converters and welding. It also includes transmissions from other radio equipment such as DECT phones and mobile telephones.
Multipath propagation which is reflection of radio signals off, usually metallic, surfaces and received again slightly later.
It’s important to understand how Bluetooth and other competing technologies react to these types of interference. There’s a useful study (pdf) by Linköping University, Swedish Defence Research Agency (FOI) and the University of Gävle on noise industrial environments.
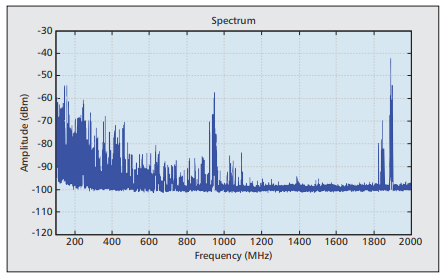
Noise in industrial environments tends to follow the following spectral pattern:
Electrical noise spectrum
There’s usually lots of electrical noise up to about 500MHz. This means wireless communication using lower frequencies, such as two way radio, exhibits a lot of noise. Pertinently, several wireless solutions for industrial applications use frequencies in the 30–80 MHz and 400–450 MHz bands. Bluetooth’s and WiFi’s 2.4GHz frequency is well above 500MHz so exhibits better reliability than some industrial wireless solutions. Incidentally, in the above charts, the peaks around 900 MHz and 1800 MHz mobile phone signals and 1880–1890 MHz come from DECT phones.
The magnitude of multipath propoagation depends on the environment. It’s greatest in buildings having highly reflective, usually metallic, floors, walls and roofs. If you imagine a radio signal wave being received and then received again nanoseconds later, you can imagine how both the amplitude (peaks) and the phase of the received signal becomes distorted over time. Bluetooth uses Adaptive Frequency Hopping (AFH) which means that packets transferred consecutively in time do not use the same frequency. Thus each packet acts like a single narrowband transmission and there’s less affect of one packet on the next one. However, what is more affected is amplitude which manifests itself as the received overall signal strength (RSSI). RSSI is often used by Bluetooth applications to infer distance from sender to receiver. We will mention mitigations for varying RSSI later.
It’s important to consider what happens when there is electrical noise. It turns out that technologies invented to ensure reliable transmission behave much less well in noisy situations. One such technique is carrier sense multiple access (CSMA), used by WLAN (WiFi), that listens to the channel before transmitting and waits until a free channel is observed. CSMA and automatic auto repeat (ARQ) also have re-transmission mechanisms. The retrying can also incur significant extra traffic that can overwhelm the communication in noisy environment. Bluetooth doesn’t use such schemes.
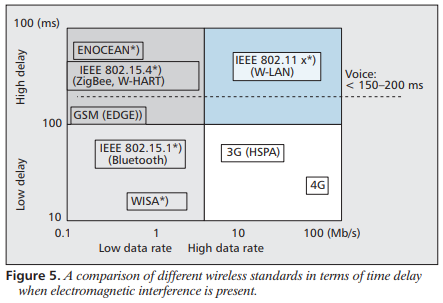
The previously mentioned research classifies different wireless technologies according to the delay when used in noisy environments:
Bluetooth (and WISA) is a good choice for noisier environments. It’s particularly suited for applications with lower data rates and sending at periodic intervals.
A final consideration is interference between Bluetooth and other technologies, such as WiFi, that use similar 2.4GHz frequencies. As mentioned in a previous post, there’s negligible overlap between Bluetooth and WiFi channel frequencies.
In summary, Bluetooth is more suited to electrically noisy environments and also offers low cost, low power and secure wireless communication.
These conclusions correlate well with our own empirical observations. We have found that Bluetooth advertising is still received in environments we have measured, using a RF spectrum analyser, to be electrically noisy around 2.4GHz . We believe this is because Bluetooth advertising hops across three frequencies such that there’s less likelihood of noise on all three. Advertising is also very short, typically taking 1 or 2 ms, making the coincidence of the noise and the advertising less likely than would be the case of a longer transmission.
It has been our experience that solutions using Bluetooth advertising are more reliable than those using Bluetooth (GATT) connections, especially in noisy environments when it’s difficult to maintain the chatty protocol of a connection over a long time period. In noisy situations, advertising is usually seen on a future transmit/scan if the first advertising is lost. By coincidence or design, Bluetooth Mesh is built on communication via advertising rather than connection and for this reason is also reliable on the factory floor.
However, using Bluetooth isn’t a silver bullet. There are situations where factories, or more usually parts of factories, have reflective surfaces or unusual radio frequency (RF) characteristics stretching into unforeseen frequencies. Poorer performing WiFi also needs to be considered in context of choosing between Ethernet and WiFi gateways and Bluetooth mesh.
It’s important to do a site survey including RF spectral analysis. This will uncover nuances of particular critical locations or coverage that can drive subsequent hardware planning. It can also feed into requirements for software processing, for example particular settings for processing within a real time locating system (RTLS) to cater for more varying RSSI.