New research involves an indoor positioning system in which Bluetooth beacons are not used to directly calculate position, but instead provide a spatial signal structure that supports localisation.
BLE beacons are installed throughout the hospital and continuously transmit signals. A smartphone receives these signals as RSSI values while the user moves. During an initial setup stage, these measurements are collected across the environment to build a radio map, which represents how signal strength varies over space. Rather than storing isolated readings at specific points, this map captures a continuous spatial distribution of signals.
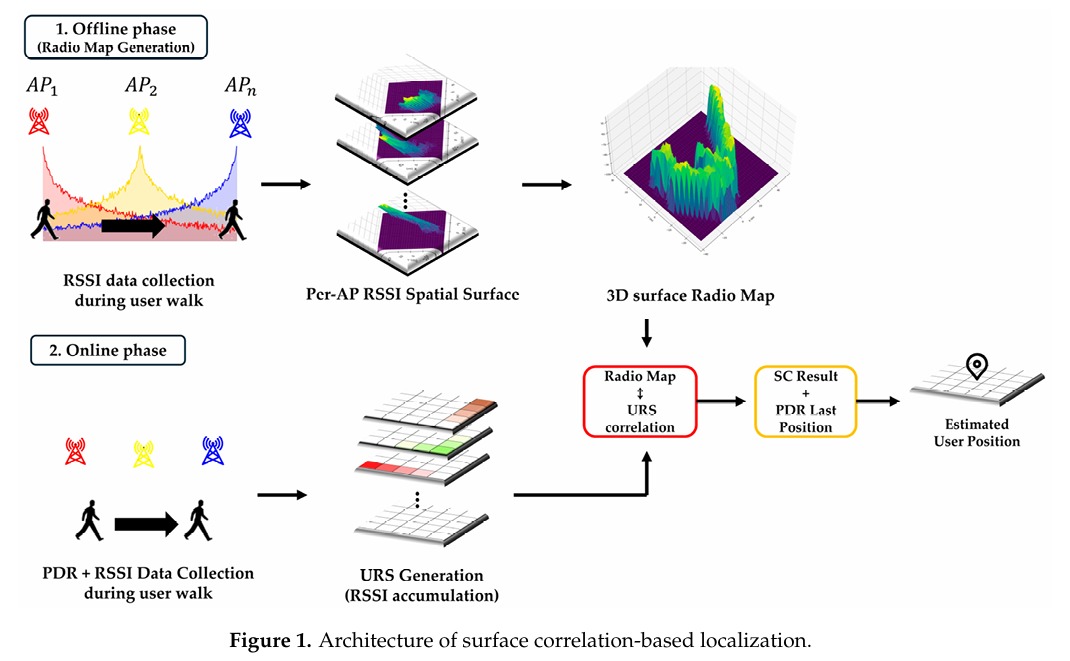
As the user walks, the phone combines inertial sensing with ongoing BLE measurements. Instead of relying on individual RSSI readings, the system accumulates them along the user’s estimated path to form a User RSSI Surface (URS). This surface represents the pattern of signal strength experienced over the trajectory, effectively encoding how the environment looks in terms of radio signals.
Localisation is achieved by comparing this user-generated signal surface with the pre-built radio map. The system searches for the position where the two patterns best align using surface correlation. In this way, the beacons enable localisation through pattern matching rather than through direct distance estimation or simple fingerprint lookup.
The beacon data also plays a key role in correcting errors from inertial tracking. Since pedestrian dead reckoning gradually drifts, the system tests multiple possible trajectory orientations and selects the one whose signal pattern best matches the beacon-based map. This allows the system to continuously adjust the user’s path and reduce accumulated error.