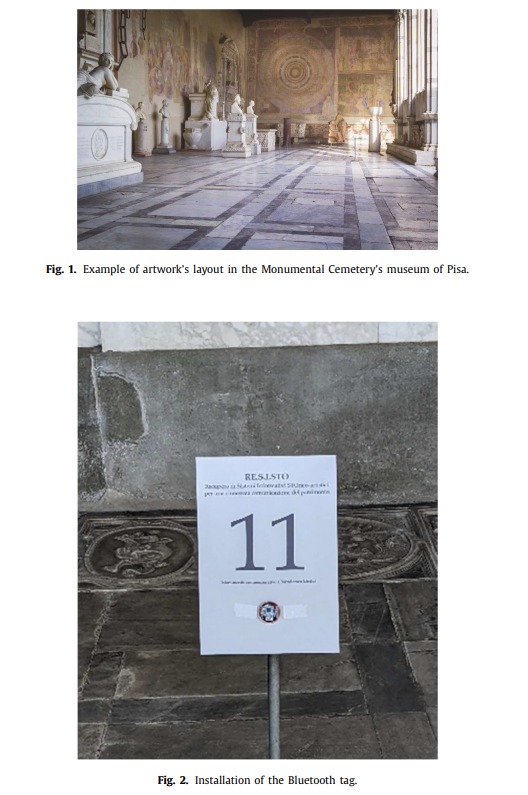
A short-range beacon is useful in scenarios where precise proximity detection is crucial. For instance, in retail environments, it can trigger notifications when a customer is near a till or near a specific product. In museums, it can provide detailed information about an exhibit when a visitor is directly in front of it. Short-range beacons are also valuable for security purposes, ensuring access control in restricted areas by detecting when someone is within a specific, confined space.
The range of a beacon can be adjusted by altering its transmission power, known as Tx Power. Tx Power determines the strength of the signal the beacon emits. By reducing the Tx Power, any beacon’s signal strength can be decreased, effectively shortening its range.
Lowering the Tx Power to reduce the beacon’s range significantly improves battery life. Since the beacon is emitting a weaker signal, it consumes less power. This efficiency is beneficial for maintaining the beacon’s operation over longer periods without frequent battery replacements or recharges.
Beacons can generally achieve a minimum range of 2 to 3 metres. However, it’s important to note that the range can fluctuate over time due to the nature of radio signals, which can be affected by environmental factors such as walls, interference from other electronic devices and physical obstructions.
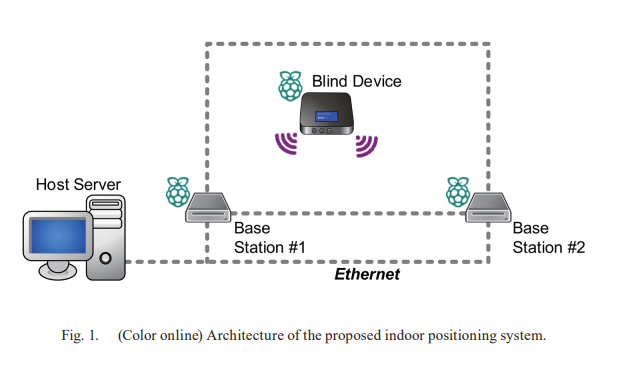
In addition to adjusting the Tx Power, the range can be fine-tuned by using the Received Signal Strength Indicator (RSSI) at the receiving end. RSSI measures the power level of the received signal, allowing devices such as smartphones (iOS and Android) or computers (like Raspberry Pi) to determine how close they are to the beacon. By setting thresholds for RSSI values in the receiving program code, you can define more precise proximity zones, ensuring that actions are triggered only when the device is within the desired range.