A new direction finding feature has been released for Bluetooth 5.1 (pdf). Using more than one antenna, as used by Quuppa, allows for direction finding.
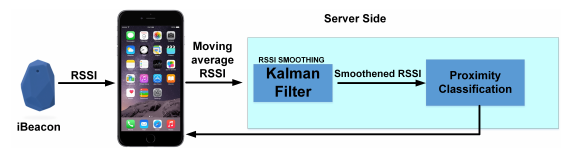
The paper on Enhancing Bluetooth Location Services with Direction Finding explains how location services currently use RSSI to estimate the distance. Direction finding introduces more advanced Angle of arrival (AoA) and angle of departure (AoD) techniques into Bluetooth 5.
“Should smartphone vendors choose to include Bluetooth direction finding with AoA support in their products, item finding solutions could be enhanced to provide directional information.”
As with the move from Bluetooth 4 to Bluetooth 5 it’s going to be while before we see (non Quuppa) products with direction finding. This feature requires specific hardware and software. Before that, it needs SDKs from the SoC vendors. Existing smartphones, beacons and gateways won’t be able to be upgraded.
Read about Using Beacons, iBeacons for Real-time Locating Systems (RTLS)