
Direction finding hardware is limited by how many Bluetooth packets can be processed per second. For example, the Minew G2/AR1 supports up to 1000 packets per second. However, this depends on the actual situation as the locator can sometimes receive packets from devices that are not tracked assets such as fitness trackers, cars and smartphones that will use up processing power.
There are two common misconceptions. The first is that it’s possible to add more hardware to support more beacons. Hardware can be added sidewise, into extra areas having extra beacons, but it’s not possible to support more beacons by adding hardware to the same area. The beacons will still be seen by all hardware. The second misconception is the use of filtering or throttling settings in the gateway to support more beacons. Again, the packets have to be processed and you are only affecting what’s being output.
How many beacons are supported by 1000 packets per second? For a beacon advertising at default 100ms, it’s advertising 10 times every second. For the Minew scenario, with 4 locators, each locator will see the beacon so the gateway works four times as hard.
1000 / 10 / 4 = 25 beacons. Only 25 beacons.
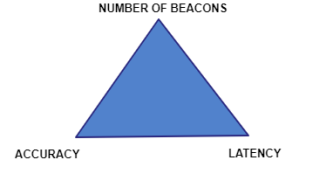
AoA Direction Finding involves a trade off between accuracy, latency and the maximum number of beacons:
The number of beacons can be increased by increasing the beacon advertising period. The Minew MWL01 beacon automatically adjusts the advertising period from 100ms to 250ms to 4 seconds based on movement detected by an accelerometer. This makes the maximum number of beacons dependent on a tricky calculation based on how often the beacons move. At the other extreme, when none of the beacons are moving, 1000 beacons can be supported in one area of 4 locators.
The beacons’ advertising period can be extended, as necessary, to increase the maximum number of beacons. When the advertising period is increased, the latency increases which is the delay after which you know the new location. Furthermore, location engines need multiple measurements, over time, to get an accurate location. This can usually be configured to trade off accuracy with latency.
If a gateway doesn’t see a beacon during scanning, it’s possible it will instead see it on a subsequent scan. Overloaded systems still produce locations but have much less deterministic latency.
When designing a new system many people say they want high accuracy, low latency and support an unlimited number of beacons. This isn’t possible. Instead, rank accuracy, latency and the maximum number of beacons in order of importance and design the system accordingly.
Read about PrecisionRTLS™