As previously mentioned, we perform signal strength and stability tests across beacons. The data feeds into our consultancy work. Here are some high level observations.
The following graph shows the standard deviation of the RSSI @ 1m, for some of our beacons, measured over a 60 second time period:
Smaller bars are better and represent beacons
whose RSSI varied the least over time.
We found that beacons belonged to one or two groups. Firstly those with very stable RSSI and secondly those with an RSSI that had a standard deviation between about 4 and 6 dBm.
Signal stability is more important when you are using the RSSI to infer distance, either directly from the RSSI itself or indirectly via, for example, the iOS immediate, near and far indicators. RSSI varying without a change of distance might cause more spurious triggering. However, you should keep in mind that environmental factors can often cause variation much larger than the 4 to 6 dBm found in this test. Moving obstacles, for example people, will cause significant variation in RSSI.
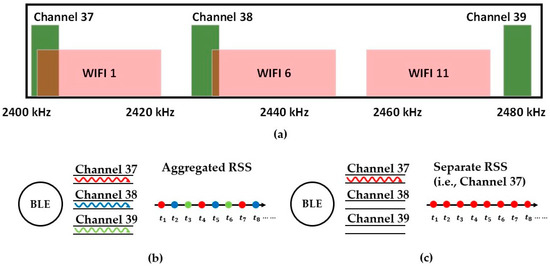
Bluetooth LE advertising moves pseudo-randomly between radio channels. The channels use different radio frequencies that, in turn, results in fading of the signal at different distances. We experienced and mitigated similar behaviour in our LocationEngine™. Different radio frequencies experience different constructive and destructive interference at different physical locations. Beacons that move more between channels can cause more rapidly varying received signal strength (RSSI).