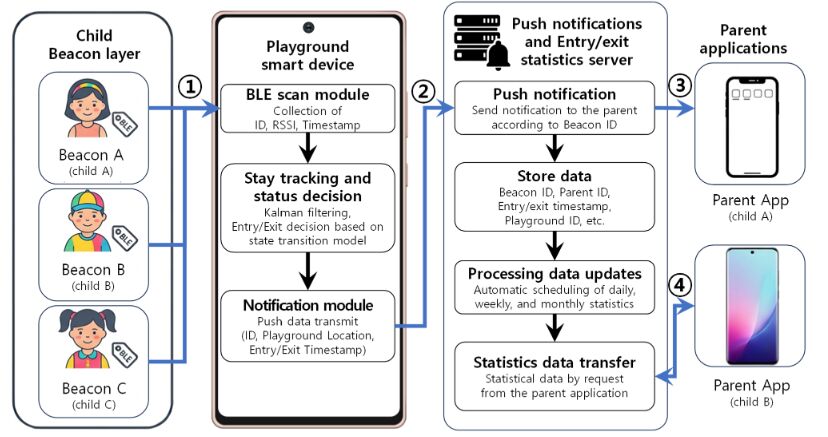
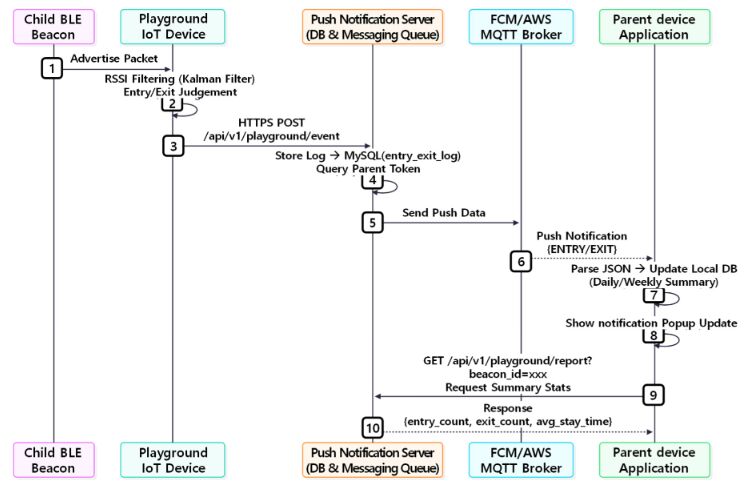
A new paper presents a low-cost system that uses Bluetooth Low Energy beacons to detect when a child enters, remains in or leaves a playground. Each child carries a Bluetooth beacon, while a single smartphone installed at the playground scans the beacon’s signal strength. Entry and exit events are then sent to a server, which issues push notifications to caregivers and creates daily, weekly and monthly activity records.
Because BLE signal strength can fluctuate due to obstacles, reflections and movement, the system applies Kalman filtering and time-based thresholds rather than reacting to every change in RSSI. This reduces false alerts near the playground boundary, although it introduces a delay of several seconds and can miss very brief exits followed by rapid re-entry.
Field tests across five playgrounds reported an average detection accuracy of about 99.2% and an average response time of roughly 6.5 seconds. A separate test with ten beacons detected 39 of 40 events, giving 97.5% accuracy. The results suggest that BLE beacons are effective for simple presence and entry/exit monitoring, but not for precise positioning. Performance may also vary with weather, site layout, crowds and beacon placement.
Many sensor beacons contain accelerometers that measure movement along the x, y and z axes. These values can be included in the beacon’s advertising data and received by a smartphone, gateway or another Bluetooth-enabled device, such as a single-board computer.
Beacons transmit advertising packets at a predefined interval. Depending on the device and its configuration, this interval is typically between 100 milliseconds and 10 seconds. An important question is what happens to the accelerometer data between these advertising events. Is the data averaged, stored or simply lost?
A key characteristic of battery-powered beacons is that they transmit for only a very short period, typically one or two milliseconds, before returning to sleep to conserve power. They do not normally continue processing or storing accelerometer readings while asleep, as doing so would significantly reduce battery life.
As a result, the x, y and z values included in an advertising packet represent the acceleration measured at, or very close to, the time of transmission. Movement occurring between advertising events is not averaged or retained.
To reduce the likelihood of missing an important movement feature, the shortest available advertising interval should be used, which is often around 100 milliseconds. However, even at this rate, movement events lasting less than 100 milliseconds cannot be detected reliably because they may sometimes occur between two advertising transmissions.
Cisco Spaces uses generic Bluetooth Low Energy (BLE) beacons rather than one proprietary beacon type. It can detect and process beacons from multiple vendors and is broadly protocol-agnostic.
Note that the information on the Cisco Spaces is wrong, confusing and almost certainly written using AI. Bluetooth TAGs, also known as beacons, are a subset of Bluetooth devices, not a separate thing.
There’s interesting new research into TinyML for On-Device and Edge Analytics in Wireless Networks. The beacon-relevant parts are concentrated around BLE indoor navigation, proximity detection, RF fingerprinting-based positioning and beacon transmission-power control.
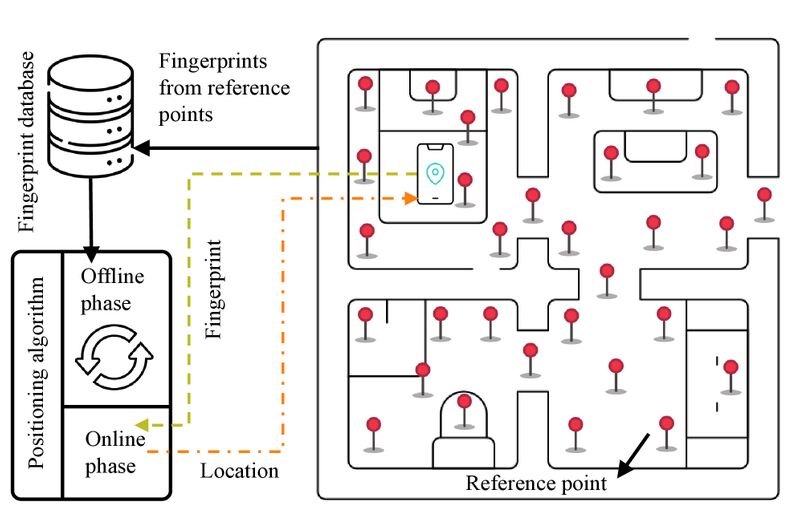
The paper describes RF fingerprinting-based indoor positioning, where radio infrastructure such as Wi-Fi access points, BLE beacons and cellular base stations can be part of the positioning system. It explains that fingerprints are collected in an offline phase, used to train a positioning algorithm, and then used online to infer an asset’s location. The paper says tiny deep learning is attractive here because it can extract features automatically, handle non-linear boundaries in indoor spaces, and run at the edge with lower latency, better privacy and less reliance on a central server. It cites an indoor asset-tracking implementation using BLE beacons that achieved about 88% location-estimation accuracy.
For BLE navigation, the paper treats beacons as especially relevant in indoor places where GPS is unreliable, such as hospitals, shopping centres, factories and university buildings. In that setting, mobile devices estimate their position using RSSI measurements from nearby BLE beacons; RSSI is the received signal power level and is also used to infer proximity between devices.
The main proposed tinyML opportunity is RSSI-based transmission-power management on BLE beacons. The idea is that beacons send periodic messages to mobile user devices, while also using RSSI from other beacons’ transmissions to estimate interference. A tiny reinforcement-learning model could run directly on each beacon, using received signals as the state, transmission power as the action, and a reward based on the resulting RSSI. The purpose is to tune beacon power continuously, reduce interference and improve indoor navigation performance.
The other beacon-adjacent opportunity is improving proximity detection through RSSI-based ranging. The paper argues that classical RSSI ranging is weak because it mostly relies on spatial features and ignores time- and frequency-domain RSSI fluctuations; motion between devices adds fading, reducing confidence and accuracy. It suggests using tiny deep learning on a mobile MCU-based receiver to incorporate broader RSSI features, including time-domain, frequency-domain and statistical characteristics, with the aim of improving distance estimates.
In practical terms, the paper’s message is that BLE beacons are a good fit for tinyML because the intelligence can move closer to the beacon or mobile device.
Many people inquire about adjusting the transmission distance of a beacon. They often wish to either conserve battery or restrict the range at which a beacon is detectable.
While some third-party platforms and SDKs offer distance settings, it’s a misconception to think you can directly set the distance. What you’re actually adjusting is the transmission power, which in turn influences the transmission distance. But since this involves radio waves, which are prone to reflections and interference, it’s impossible to guarantee that a specific power will equate to a precise distance.
When using an app to detect beacons, you can employ the Received Signal Strength Indicator (RSSI) to focus on those within a desired range. However, it’s challenging to precisely correlate RSSI with the actual distance.
Some wonder if they can set the distance in terms of centimetres, similar to NFC. Typically, this isn’t feasible because even at their lowest power setting, most beacons transmit over a distance of about a metre.
Rather than asking if the transmitter’s distance can be minimised, it might be more practical to configure the receiver to disregard detections from further away. By using the RSSI value on the receiving app or another receiving Bluetooth scanning device, you can filter out distant beacons. Specifically, you can dismiss detections with an RSSI below a certain threshold, allowing you to focus on detections within a centimetre range. However, even this will not be that precise.
Bluetooth Low Energy direction-finding is becoming an important technology for indoor positioning. In factories, warehouses, offices and retail spaces, it can help locate tools, equipment, staff or customers without relying on cameras or other intrusive sensing systems. Yet one familiar problem still limits its accuracy: signals do not always travel directly from the transmitter to the receiver.
When there is a clear line of sight, Bluetooth angle-of-arrival measurements can be much more reliable. In real indoor environments, however, walls, furniture, metal structures and other obstacles can block or reflect the signal. These non-line-of-sight conditions create multipath effects, where the receiver picks up scattered reflections rather than the direct signal. That can bias the estimated direction and make the final location estimate less trustworthy.
A new study introduces a lightweight machine-learning approach designed to detect when Bluetooth measurements are likely to be unreliable. Rather than trying to fix every distorted signal, the system follows an “identify and discard” strategy. It classifies incoming measurements as line-of-sight or non-line-of-sight, allowing a positioning engine to ignore or down-weight the signals most likely to reduce accuracy.
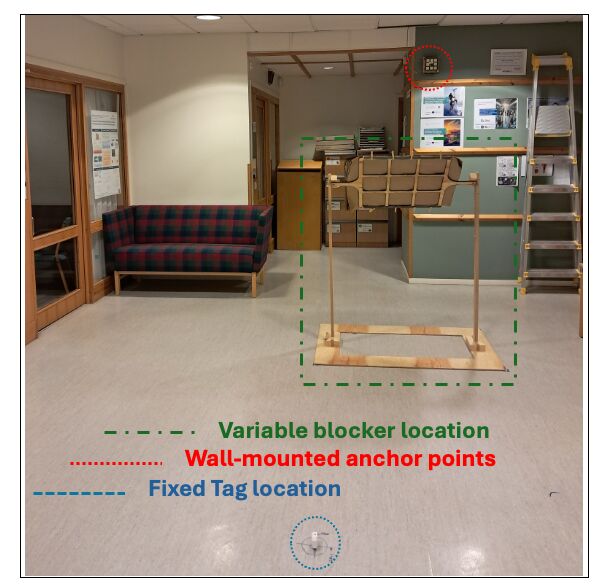
A key part of the work is that it focuses on Bluetooth-native data. Many existing line-of-sight detection techniques are built for ultra-wideband or cellular systems, where richer channel measurements are available. Bluetooth direction-finding operates under tighter bandwidth and hardware constraints, so the researchers instead use Constant Tone Extension in-phase and quadrature data, known as CTE IQ features. These are the kinds of measurements already available in BLE angle-of-arrival systems, making the approach more practical for real deployments.
To test the idea, the researchers collected labelled Bluetooth measurements in two indoor environments using a u-blox direction-finding development kit. They created both line-of-sight and non-line-of-sight conditions, including the use of a blocker to remove the direct signal path and force the receiver to rely on reflected or scattered signals. This produced controlled datasets that could be used to train and compare different machine-learning models.
The proposed pipeline starts with robust preprocessing to reduce the influence of outliers, which are common in reflected indoor radio signals. The researchers then use principal component analysis to study how line-of-sight and non-line-of-sight measurements differ statistically. Adaptive kernel density estimation helps reveal that non-line-of-sight data often has heavier tails and more irregular spread, especially in higher-dimensional feature spaces.
For classification, the paper compares several approaches, including support vector classifiers, random forests and a small multilayer perceptron. The central contribution is the use of Nyström kernel approximation, which creates a compact nonlinear feature representation without the full computational cost of traditional kernel methods. This matters because Bluetooth positioning systems are often expected to run on embedded devices with limited memory, processing power and latency budgets.
The findings suggest that reliable indoor Bluetooth positioning does not necessarily require heavy machine-learning models or expensive hardware. By designing features around the specific characteristics of BLE direction-finding signals, it is possible to build a practical detector that can flag poor-quality measurements before they damage the final position estimate.
This work is especially relevant for industrial and commercial environments where indoor positioning needs to be robust, affordable and scalable. In the future, this type of line-of-sight detection could be integrated directly into Bluetooth positioning engines, allowing systems to assign confidence scores to angle measurements and make smarter triangulation decisions.
The broader message is simple. Better Bluetooth positioning may depend not only on estimating where a signal comes from, but also on knowing when that signal should not be trusted.
We have made two changes to the delivery of beacon hardware.
For UK deliveries,we now use DPD rather than UPS. After 11 years with UPS, they increased our UK prices considerably, making the service unsustainable for us. UPS has been pruning lower-margin business and restructuring its network, including closing facilities, cutting operational roles and increasing prices for smaller customer accounts. We have be trialling DPD for the last two months and we are confident our customers will see no difference in the service they receive. UK delivery remains a 1–2 day courier service and we have prevented a large increase in delivery fees. For now, we will continue to use UPS for International orders and very large UK orders but this is under review.
We have also stopped delivering beacon hardware to the USA. This is due to a combination of increasingly onerous import documentation requirements, a new arbitrary UPS fee if they contact our customer, the removal of the de minimis limit and continued uncertainty around import taxes.
We sometimes speak to companies only after they have gone a long way down a particular path, only to discover that an early assumption was wrong. They may have committed heavily to the wrong beacon, chosen the wrong platform, or made assumptions about one of the mobile platforms without doing enough research. In many cases, we can help them get back on track, but not always.
At the other end of the research spectrum are companies that ask us questions such as, “Will beacons work in an xyz environment?” The “xyz” has ranged from underground on the Tube for the police to inside cars for a car retailer. We also hear from many so-called “armchair entrepreneurs” who want to work everything out in theory before they have even handled a beacon.
While we have extensive expertise and provide advice through consultancy, there are often aspects that remain unknown until they are tested in the real environment. Wireless solutions can be unpredictable, and practical testing is often the only reliable way to uncover issues.
A great deal can be learned about beacons, Bluetooth and the environment by buying a single inexpensive beacon and trying things out. For software projects, the equivalent is to build a thin slice of the proposed system, focusing on the areas that seem risky or uncertain. Experiment before committing. Do not invest in thousands of beacons or commission fully customised software until you are confident the solution will work in practice.
Bluetooth WiFi gateways offer MQTT and/or HTTP for sending data to servers/cloud services. We are often asked which should be used. HTTP is what’s used by your web browser to fetch and send data to web servers. In very high level terms, MQTT accomplishes a similar thing but is better optimised for mobile devices and the Internet of Things.
HTTP is very ‘chatty’ which means it’s more complex, code wise, to implement at the sending end and wastes a lot of data and processing power getting information from sender to receiver. You can think of HTTP as wrapping the data within lots other data that gets sent backwards and forwards. MQ Telemetry Transport Protocol (MQTT) came out of IBM, is now an ISO standard and uses lightweight publish/subscribe messaging. It requires a smaller code footprint at the sender and uses less network bandwidth. This matters most when you are trying to get the maximum transactions per second or are being billed for data use.
Bluetooth WiFi gateways are powered via USB and have reasonably powerful microcontrollers so MQTT’s efficient processing doesn’t matter that much. The more efficient processing is more applicable to apps running on mobile devices.
However, being lightweight, MQTT offers faster response times and lower data use than HTTP that, while not necessarily being of much of an advantantage for the BLE WiFi gateway, benefits the communications medium and server side. The communications medium, that can sometimes be cellular or be data constrained, uses (and possibly bills) less data. More crucially, the server can process more requests in less time. MQTT tends to be better when connectivity is intermittent, bandwidth is at a premium and throughput is critical.
In summary, MQTT has lower latency and is more efficient. Whether these are required advantages depends on your actual project. If you need more help, consider our development services.
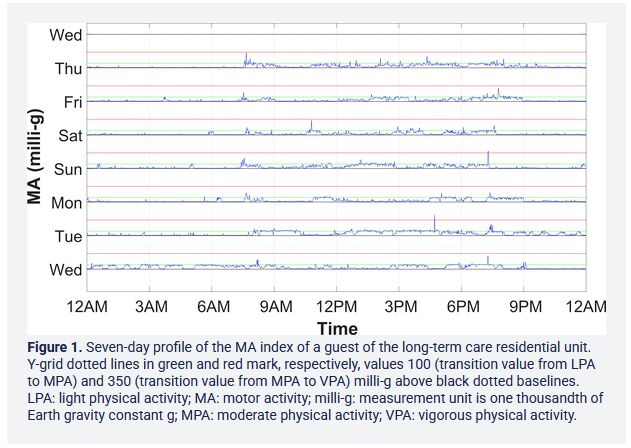
A study was published recently in JMIR mHealth and uHealth. Researchers evaluated a monitoring method that integrated wrist-worn accelerometers with ankle-worn Bluetooth beacons to track individuals with dementia in a long-term residential unit.
The system continuously recorded physical activity intensity, walking bouts, sleep efficiency, and social interactions based on indoor location tracking. The researchers found the beacon-based methodology to be feasible and highly reliable for identifying clinical behaviours, such as wandering, with minimal intrusion.