There’s new research from University of Porto, Portugal on Design and Experimental Evaluation of a Bluetooth 5.1 Antenna Array for Angle-of-Arrival Estimation.
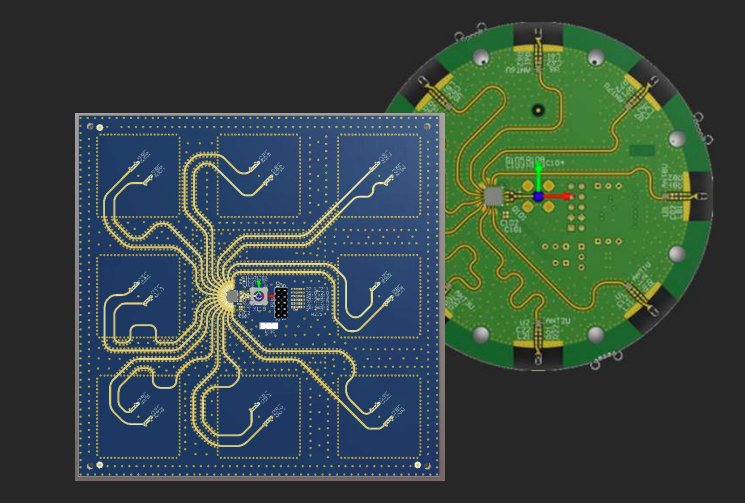
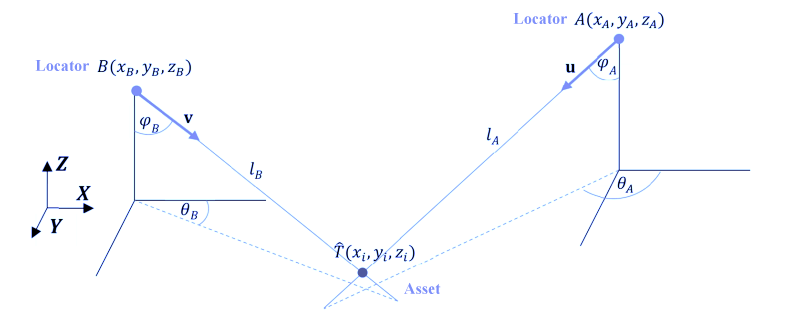
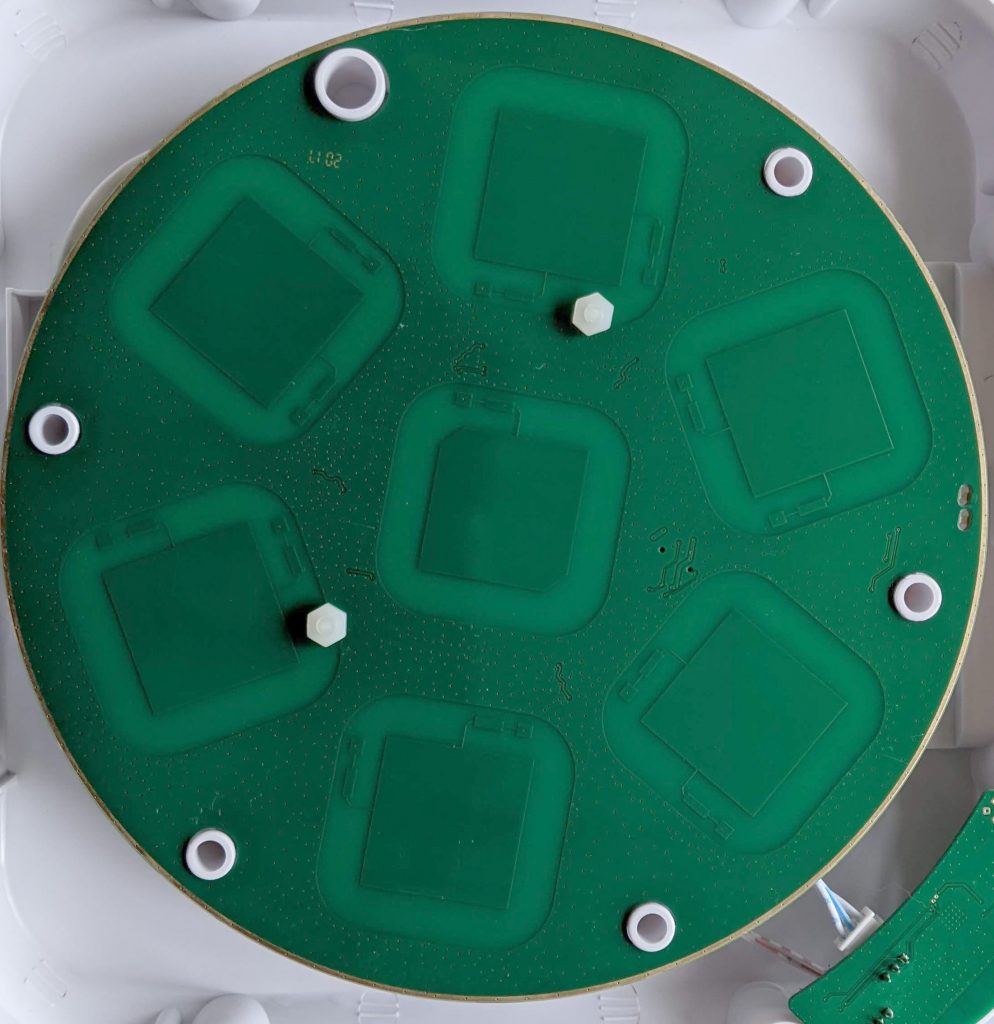
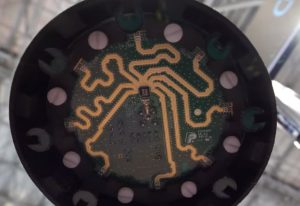
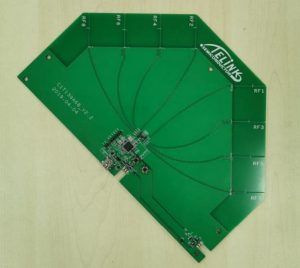
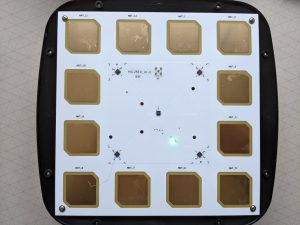
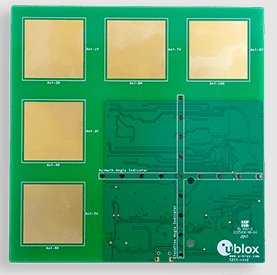
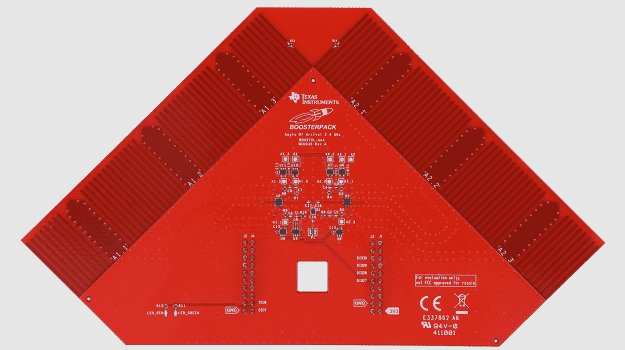
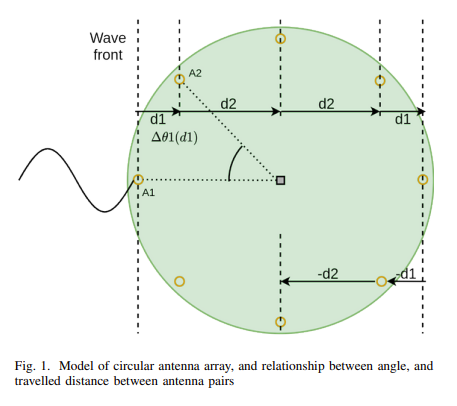
Experiments were conducted on a circular antenna array in an anechoic chamber and in a real-world environment to evaluate the quality of the retrieved data. The setup included four beacons advertising a Constant Tone Extension (CTE).
The researchers used a combination of ways to process the data including a non-linear recursive least square method, an unscented Kalman filter, non-linear least square curve fitting, a Gaussian filter and Multiple Signal Classification (MUSIC).
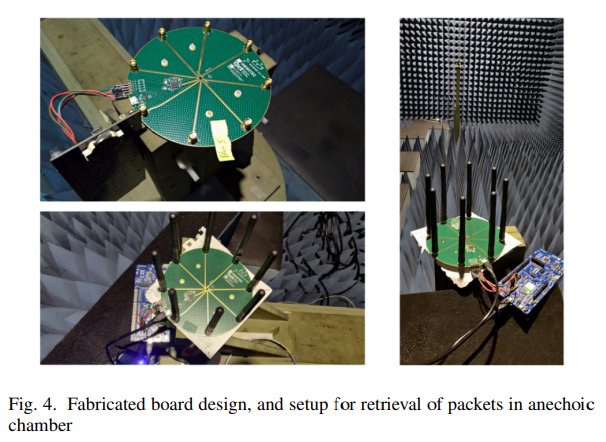
The paper explains how reducing computational complexity is critical in order to achieve real-time processing on edge devices. Accuracy is affected by noise originating from multi-path effects, differences in oscillators between transmitter and receiver, behaviour of the RF switch and slight variations in impedances of the antenna tracks between antenna pairs. There’s much more noise in the real-world environment than in the anechoic chamber.
The researchers conclude that they found it difficult to reduce the error in the obtained phase measurements and identify which packets were reflections.
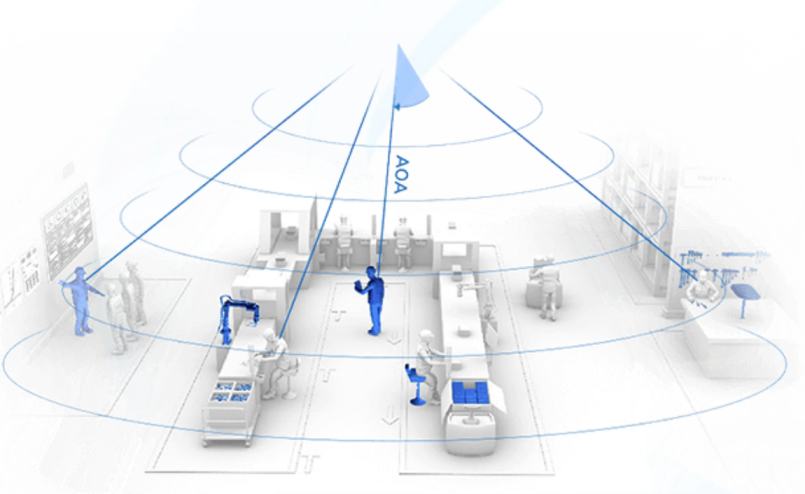
This paper demonstrates that processing of AoA IQ data is non-trivial. Processing in real-time for a more than a few assets is a challenge. This is why, while many AoA reference kits’ can be used to demonstrate AoA, the accompanying software often isn’t scalable to the required number of assets.
Read about PrecisionRTLS™