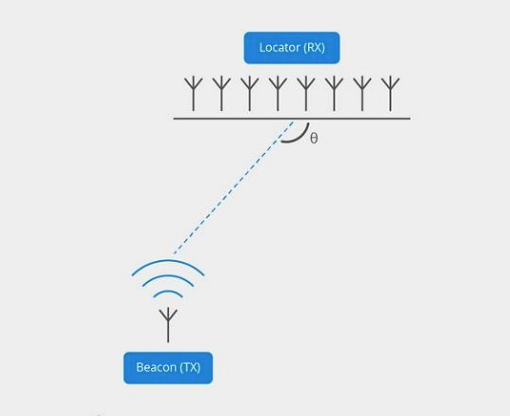
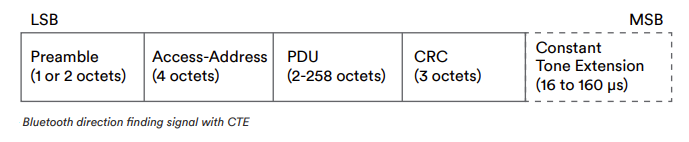
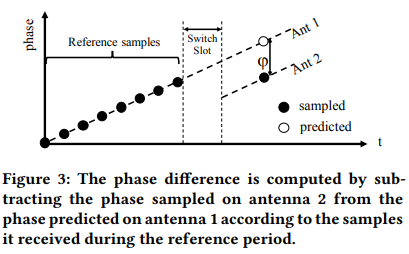
The MWL01 Beacon is an AoA beacon which means it advertises a constant tone extension (CTS) for angle of arrival detection. An accelerometer detects the degree of movement and adjusts the advertising across three levels between 100ms (fast) -> 250ms (normal) -> 4s (slow) to save battery life. The battery level is provided in the advertising data. Double clicking the button changes the advertising, for example, for SOS notification.

Here are some observations that aren’t immediately obvious in the documentation:
- While AoA is Bluetooth 5.x, It actually advertises Bluetooth 4.1 rather than 5.x. This makes it suitable for non-AoA applications where it can be detected by non AoA Bluetooth 4.1 receivers. It’s particularly suited for asset tracking because it increases the period between advertising, when not moving, to significantly save battery.
- You might think the change to 4s advertising isn’t working. Be patient. It takes 5 minutes of normal advertising before it switches to slow advertising. Note that it also takes 5 seconds to go from fast advertising to normal advertising. While the advertising rates can be changed, the times to transition can’t be changed.
- The beacon that is supplied with the AoA kit is different to that supplied separately. The kit’s MWL01 is fixed to 100ms advertising and can’t be changed. This is because it much easier to evaluate AoA and develop software when the advertising is consistent over time. The kit MWL01 can be upgraded, if necessary, to support the changing advertising period. However, we recommend you keep them as 100ms advertising beacons for ease of testing.
- The ‘Location Finding’ flag in the AoA advertising is actually an indication of the double button press rather than anything to do with direction finding. This flag stays on for a minute and the blue led flashes during this time. Again, the double button press is only available on the non-kit beacon.
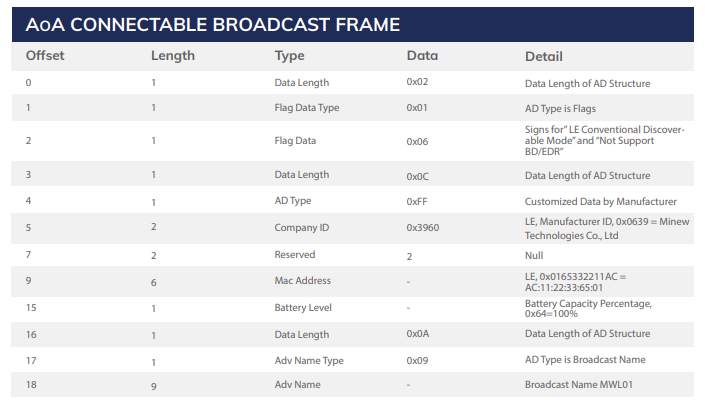
- The battery level isn’t in the AoA data advertising. The beacon advertises a second connectable broadcast frame that includes the MAC address and battery level every 1s, 1s and 4s in the fast, normal, and slow modes respectively. These times can’t be changed.
- Unfortunately, Minew are stipulating that the settings and firmware upgrade are only available to people who have signed an NDA with Minew or BeaconZone if you purchased the beacons from us.