The new paper Relabeling for Indoor Localization Using Stationary Beacons in Nursing Care Facilities by Christina Garcia and Sozo Inoue from the Graduate School of Life Science and Systems Engineering, Kyushu Institute of Technology, Japan, presents a study on enhancing machine learning for indoor localisation in caregiving, specifically in nursing homes, using Bluetooth Low Energy (BLE) technology.
The study addresses the challenge of limited data available for training machine learning models in indoor localisation, which is critical for monitoring staff-to-patient assistance and managing workload in caregiving environments. The authors propose a data augmentation method that repurposes the Received Signal Strength (RSSI) from various beacons by re-labeling them to locations with fewer data samples, thus resolving data imbalances. This method uses standard deviation and Kullback–Leibler divergence to measure signal patterns and find matching beacons for re-labeling. Two variations of re-labeling are implemented: full and partial matching.
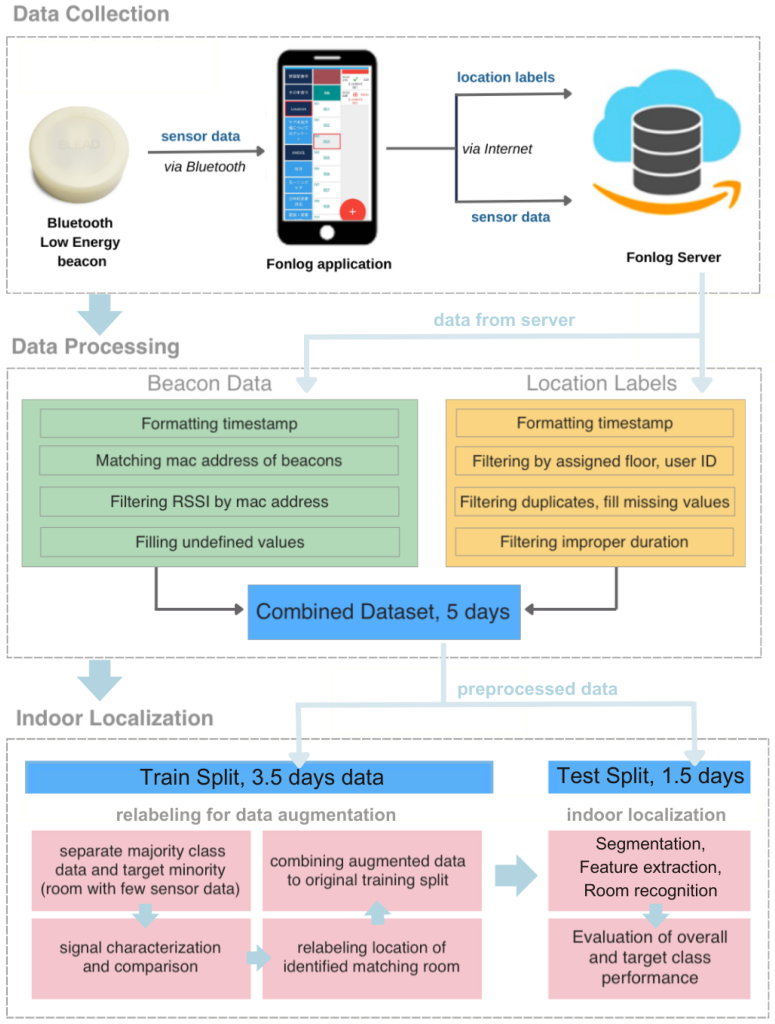
The performance of this method is evaluated using a real-world dataset collected over five days in a nursing care facility equipped with 25 Bluetooth beacons.
Overall, the study highlights the effectiveness of the proposed re-labelling method in enhancing indoor localisation accuracy in nursing care facilities, providing a valuable contribution to the field of caregiving and workload management.