Carnival Cruises is using Ocean Medallion™, a beacon that allows you to board the ship, open your room door, navigate the ship, find your family and friends onboard, make reservations and order and pay for food and drinks.
This is a significant and well thought out rollout for many reasons:
Large undertaking – In order to use the system, each ship is fitted with 75 miles (121km) of cables, more than 7,000 sensors and 4,000 digital screens.
Mass market promotion – it has even been mentioned on the BBC.
First large rollout to use beacons with NFC – As we previously mentioned, NFC can be used for, closer, security-related activities such as payment.
Used as a USP – The How It Works web page is using the added convenience as a unique selling point.
No battery life problems – The beacon only has to transmit and last as long as the holiday.
User Experience aware – The beacon has been designed to look like jewellery to gain acceptance. It’s engraved with the customer’s name and can be worn as a necklace, clip or on a keychain.
The clever part is that the gains aren’t just for Carnival cruise guests. The new system will also allow more personal location information to be gathered that can be used offer better targeted promotions and hence help increase revenue per customer.
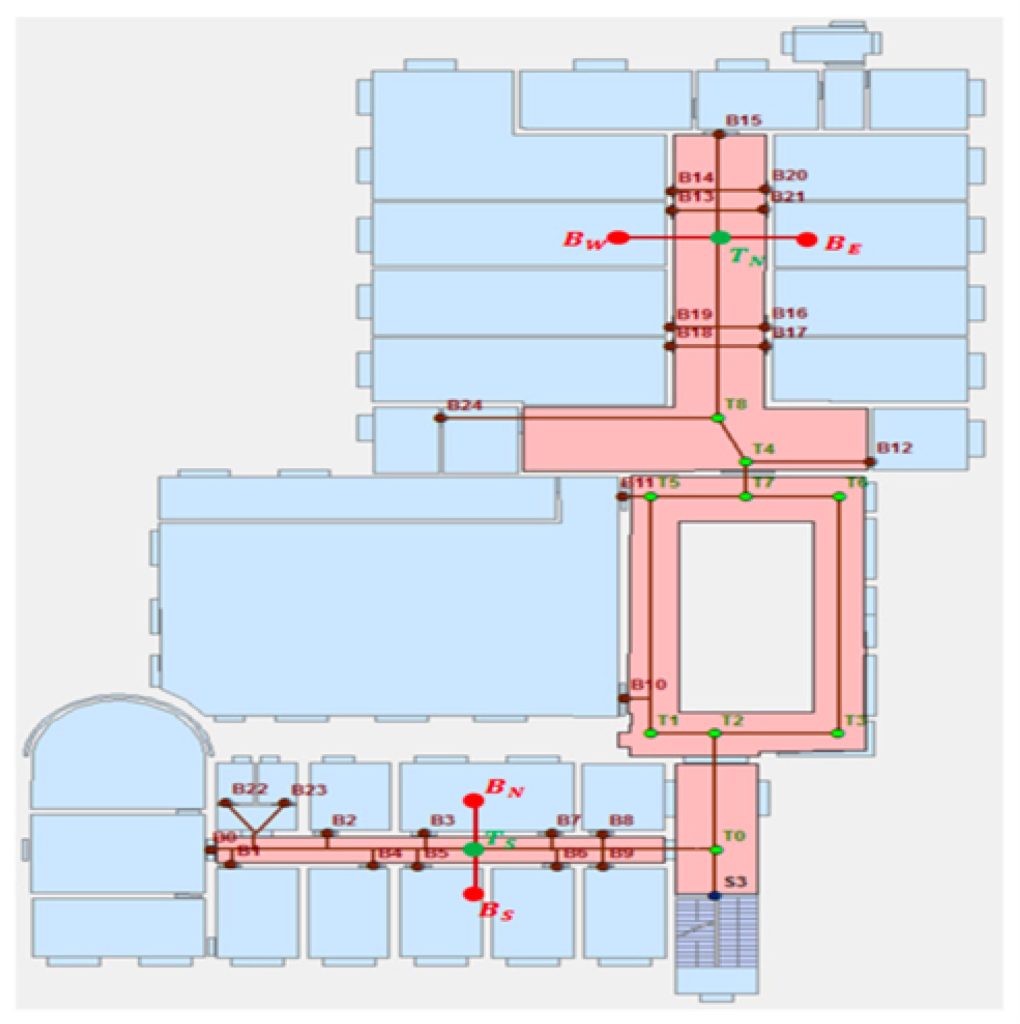
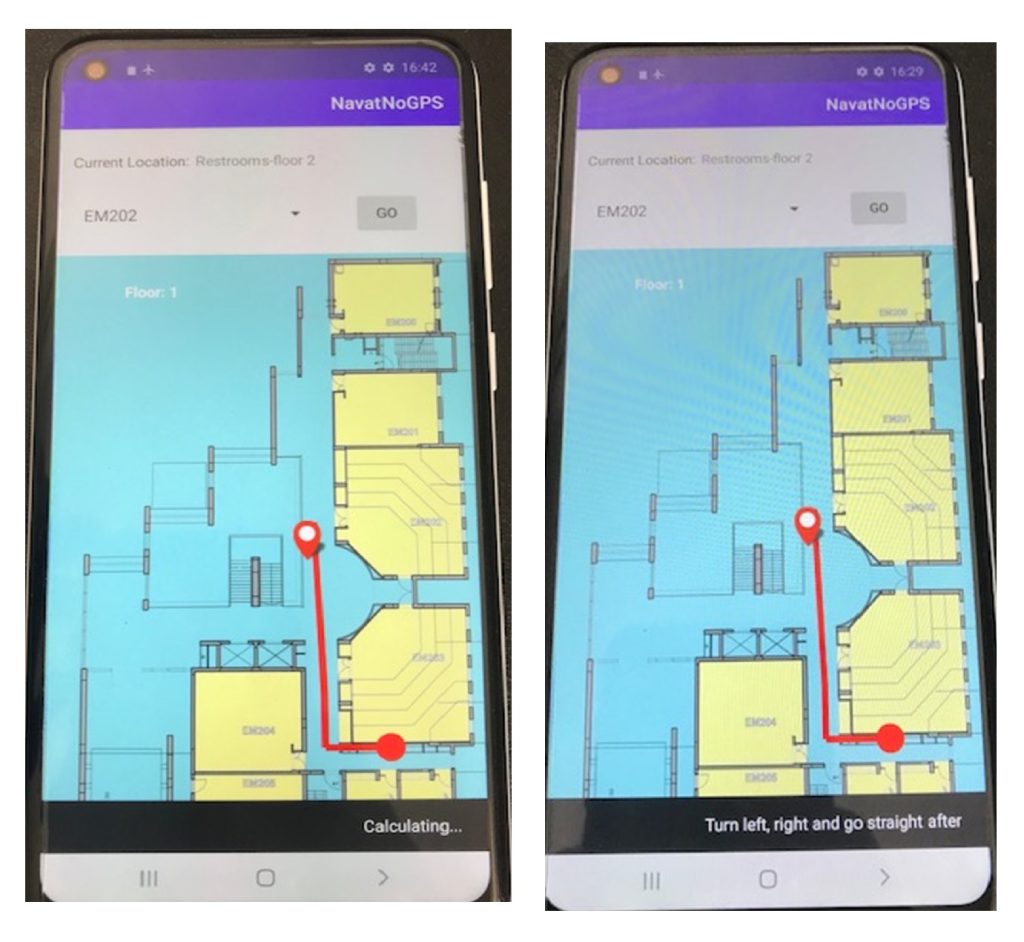
New research looks into indoor navigation systems specifically designed for environments with repetitive structures, such as cruise ships, using Bluetooth low-energy (BLE) beacons without relying on GPS. The system incorporates a mobile application that uses these beacons to guide users accurately within buildings. The system optimises navigation through the use of pre-calculated routes, which minimises data storage requirements and enhances the application’s energy efficiency.
It system includes a sophisticated user interface that displays the route and updates navigation in real-time based on user movement and beacon signal reception. The implementation faced several challenges, particularly related to the synchronisation and real-time processing of beacon signals, which were addressed by optimising the beacon scanning process and the communication between system components.
The study lays the groundwork for future exploration and deployment of indoor navigation systems that leverage repetitive architectural features for enhanced navigation efficiency.
Minew has recently launched two new beacon models, the MWC01 and MBT02, a new type of product that is a repeater. These repeaters are designed to scan for beacons and re-transmit the strongest signal, providing a new approach to locating, and a way of extending Bluetooth communication.
The intended use of these repeaters isn’t entirely clear from the Minew website, so here’s an explanation of how they work and their benefits.
Traditional Beacon Systems
In a conventional setup, multiple gateways detect beacons within an area and server-side software uses trilateration to calculate the position of an asset or person. This method often lacks accuracy due to the fluctuating and imprecise nature of Received Signal Strength Indicator (RSSI) measurements.
Bluetooth Direction Finding
Bluetooth Direction Finding was introduced to improve accuracy. It uses the angle of arrival of Bluetooth signals, requiring complex software and specialised hardware. While very effective, this method can be complicated, time consuming and expensive to implement.
The Role of Repeaters
Minew’s new repeaters offer a middle ground between traditional RSSI-based systems and advanced Bluetooth direction finding. Here’s how they work.
Extra fixed Bluetooth beacons are placed throughout the area. The repeaters, attached to moving assets, detect the beacons and send the strongest signal to a single gateway. This reduces the number of gateways needed and allows for the strategic placement of beacons to enhance accuracy where necessary. It is a simpler and more cost-effective solution than Direction Finding implementations.
Additional Uses
Repeater beacons can also function as fixed repeaters to extend the range of a beacon where it’s insufficient. This is particularly useful for sensing and IoT applications, providing extra range and reliability.
Contact Us
Interested in integrating Minew’s repeater beacons into your solutions? Contact us for more information.
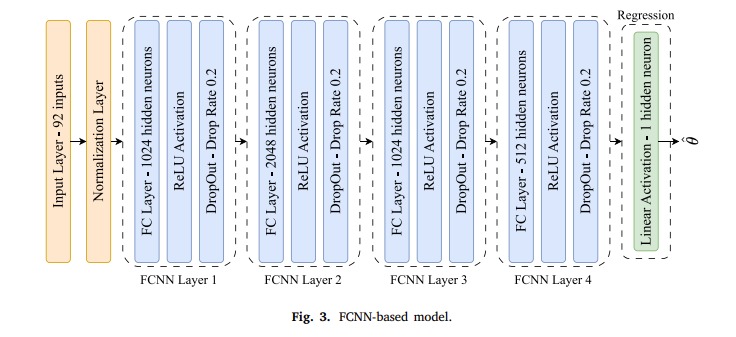
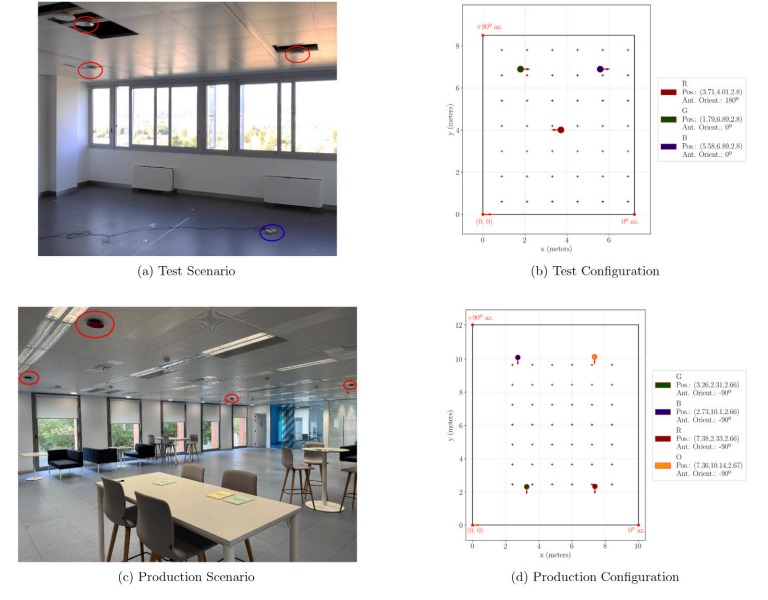
New Research, On the Generalization of Deep Learning Models for AoA Estimation in Bluetooth Indoor Scenarios, by Ivan Pisa, Guillem Boquet, Xavier Vilajosana, and Borja Martinez of Universitat Oberta de Catalunya, Barcelona, Spain, looks into the application of Deep Learning (DL) models for Angle-of-Arrival (AoA) estimation, a key technique for indoor positioning in Bluetooth indoor positioning.
Accurate estimation of the Angle-of-Arrival (AoA) is complex. The accuracy of AoA estimates can be significantly affected by various signal disturbances such as multipath components, polarisation, spread delays, jitter and noise. These factors can create ambiguities and distort the phase differences of received signals, leading to errors in the position data reported by the system. Also, the multipath effect, where multiple signal replicas interfere with each other, can severely mislead AoA estimations.
Conventional algorithmic AoA estimation techniques rely heavily on processes that can increase the cost, reduce scalability and complicate the operation of the systems where they are used. A primary requirement is the calibration of the antenna array to obtain its steering vector, a process that ensures accurate directional sensitivity of the antenna system. This calibration, along with other computationally intensive tasks such as matrix inversion and eigenvector decomposition, requires significant computational resources. This can be particularly challenging when these systems need to be scaled up for large deployments.
The study’s main objective was to evaluate and compare the generalisation capabilities of AI machine learning models to traditional signal processing techniques, such as the Multiple Signal Classification (MUSIC) algorithm, across various scenarios including different locator positions, time instant and unfamiliar environments.
The results indicated that while DL models perform well within the environment they are trained in, their ability to generalise to new or altered conditions is notably weaker than that of the MUSIC algorithm. The authors concluded that DL models tend to learn specifics of the training environment rather than generalisable features of the AoA estimation task. This learning limitation hampers their practical application since models trained in one environment perform poorly in another.
Analysing sensor data from Bluetooth beacons using machine learning involves several steps, from data collection and preprocessing to model development and deployment. Here’s an overview of the process:
Step 1: Data Collection The first step in analysing sensor data from Bluetooth beacons is to collect the data. Beacons continuously broadcast data such as unique identifiers, signal strength (RSSI) and sometimes telemetry data like temperature an battery level. Sensor beacons also enable detection of a wide range of environmental and operational metrics. To collect this data, you need one or more receivers such as smartphones or gateways that can detect these signals and store and forward the data for further analysis.
Step 2: Data Pre-processing Once data collection is complete, the raw data often needs to be cleaned and structured before analysis. This may involve:
Removing noise and outliers that can distort the analysis.
Filtering data to focus only on relevant signals.
Normalising signal strength to account for variations in distance and transmitter power.
Time-stamping and sorting the data to analyse temporal patterns.
Step 3: Feature Engineering Feature engineering is sometimes critical in machine learning. For beacon data, features might include the average signal strength, or changes in signal strength over time. These features can help in developing models that understand patterns in data, such as identifying the trajectory of a moving beacon.
Step 4: Machine Learning Model Development With pre-processed data and a set of features, you can train machine learning models to detect, classify, or predict. Common machine learning tasks for beacon data include:
Classification models to determine the type of interaction (e.g. particular types of movement).
Regression models to estimate distances from a beacon based on signal strength.
Clustering to identify groups of similar behaviours or patterns.
Tools and frameworks like Python’s scikit-learn, TensorFlow or PyTorch can be used to develop these models.
Step 5: Evaluation and Optimisation After developing a machine learning model, it’s important to evaluate its performance using metrics like accuracy, precision, recall and F1-score. Cross-validation techniques can help verify the robustness of the model. Depending on the results, you may need to return to feature engineering or model training to optimise performance.
Step 6: Deployment and Real-time Analysis Deploying the model into a production environment is the final step. This means integrating the model into an existing app or system that interacts with Bluetooth beacons. The goal is to analyse the data in real-time to make immediate decisions such as sending notifications to users’ phones.
A new paper Smart Library Applications in Oman using iBeacon Technology: A Case Study by Asma Abdullah Saleh Alabbadi and S. M. Emdad Hossain discusses the implementation of Bluetooth technology at the University of Nizwa Library in Oman to enhance library services using the latest technology. They use Bluetooth Low Energy to provide location-based services within the library, allowing users to easily locate books on the shelves, receive updates about new arrivals and library events and reduce staff workload by automating responses to frequent queries.
The study highlights the increasing integration of smartphones and communication technologies in various sectors, emphasising the need for academic libraries to adopt these technologies to improve efficiency and user satisfaction. By linking Bluetooth with the library’s Koha system through a smartphone application, users can navigate the library more independently, which streamlines operations and improves service delivery.
The paper includes a detailed discussion on the broader applications of spatial computing and iBeacon technology in various fields, showing its versatility and relevance. The authors propose further support for modern technological integration in libraries to maintain relevance and enhance the user experience.
Bluetooth beacons represent a significant and evolving technology due to their integration into the Internet of Things (IoT). These small, wireless transmitters have become increasingly integral to various industries, leveraging the power of Bluetooth Low Energy (BLE) to communicate with and locate nearby smart devices.
Bluetooth beacons emerged in the early 2010s, with Apple’s iBeacon being one of the pioneering technologies in 2013. These initial beacons were primarily used for proximity-based advertising and retail applications. They operated by broadcasting a unique identifier to nearby devices, typically smartphones, which could then trigger specific actions or notifications when within range.
As the technology matured, so did the capabilities of Bluetooth beacons. Beacons gained sensors that detect movement (accelerometer), movement (started/stopped moving), button press, temperature, humidity, air pressure, light level, open/closed (magnetic hall effect), proximity (PIR), proximity (cm range), fall detection and smoke. This evolution expanded the potential use cases for beacons, moving beyond simple proximity notifications to more complex location-based services and data collection.
In the retail sector, beacons continue to enhance customer experiences. They facilitate personalised promotions, guide in-store navigation and provide valuable insights into shopper behaviour. By analysing the data collected from beacon interactions, retailers can optimise store layouts and tailor marketing strategies.
Bluetooth beacons have made inroads into healthcare. In hospitals, they assist in tracking equipment, monitoring medicine temperature, monitoring patients and managing staff workflow. This technology has been particularly useful in enhancing patient care and optimising resource allocation.
In urban environments, beacons contribute to the development of smart cities. They support wayfinding solutions, sense environmental quantities, help manage public transportation systems and aid in monitoring urban infrastructure. By integrating with other IoT devices, they play a crucial role in creating interconnected and efficient urban spaces.
In warehouses, Bluetooth beacons play a pivotal role in streamlining operations and enhancing efficiency. By strategically placing these beacons throughout the facility, warehouse managers can achieve real-time location tracking of both inventory and equipment. This setup enables monitoring of stock levels, swift location of items for order fulfilment and effective management of warehouse space. Additionally, beacons can be used to track the movements of workers, helping to optimise workflows and reduce the time spent searching for items. This level of tracking not only improves operational efficiency but also contributes to enhanced safety by monitoring the flow of foot and vehicle traffic, thus reducing the likelihood of accidents.
In industrial settings and factories, Bluetooth beacons have become instrumental in advancing the concept of the smart factory. They are employed for a variety of purposes, including asset tracking, workflow optimisation and safety enhancements. By attaching beacons to machinery, tools and raw materials, factories can achieve real-time visibility into the location and usage of these assets. This tracking capability is crucial for efficient inventory management and quick response to maintenance needs, reducing downtime. They also enhance worker safety by establishing geofences that alert when personnel enter hazardous areas or when equipment operates in close proximity to workers. Sensor beacons represent a leap forward in monitoring and managing complex operations. These beacons, equipped with various sensors, collect critical data such as temperature, humidity, vibration and light levels. In machinery-heavy sectors, vibration-sensing beacons help predict maintenance needs, detecting early signs of equipment wear or malfunction. This proactive approach to maintenance not only prevents costly downtime but also extends the lifespan of machinery. Furthermore, integrating these sensor beacons with an IoT platform allows for the aggregation and analysis of data, leading to insights that drive operational efficiency and continuous improvement in factory settings.
In summary, As the IoT ecosystem expands, Bluetooth beacons are becoming more intertwined with other technologies. Their ability to bridge the physical and digital worlds makes them essential in creating comprehensive IoT networks. Together with Bluetooth gateways, they facilitate seamless interactions between various smart devices, enhancing data collection and automation.
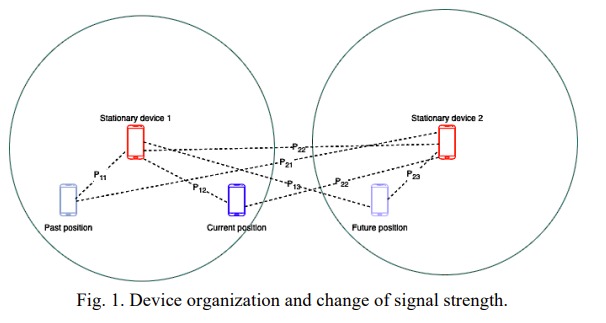
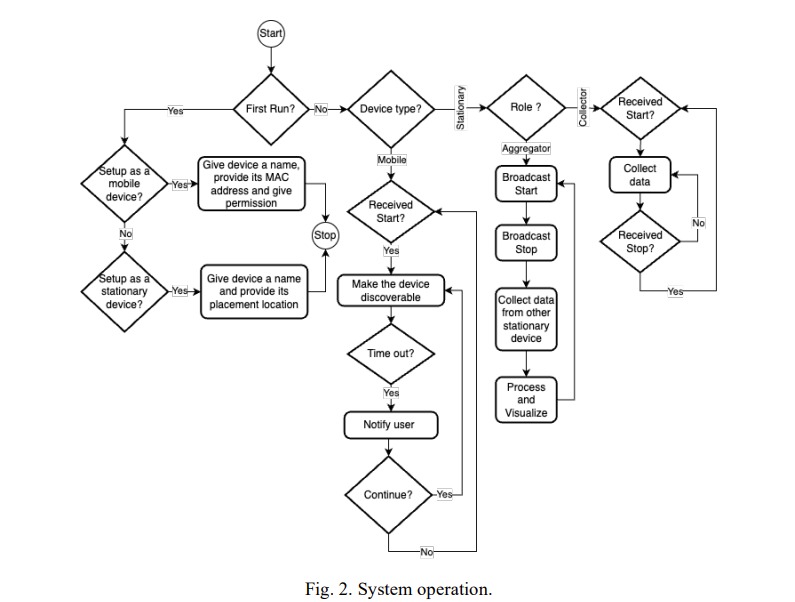
The new paper titled A Mobile App-based Indoor Mobility Detection Approach using Bluetooth Signal Strength (PDF) by Muztaba Fuad, Anthony Smith and Debzani Deb from Winston-Salem State University, explores the development and application of a novel system for detecting indoor mobility patterns using the Bluetooth signal strength from mobile devices. This research is significant for its potential real-world applications, particularly in optimising indoor layouts for efficiency.
The research underscores the limitations of GPS in indoor settings, necessitating alternative localisation techniques such as Bluetooth for indoor mobility detection. The study is motivated by the potential efficiency improvements in industries like healthcare, where space optimisation can significantly enhance operational efficiency and patient care.
The approach uses a mobile application to collect Received Signal Strength Indicator (RSSI) data to determine paths taken by mobile devices within indoor spaces. The system comprises a vectorised algorithm for path determination, highlighting its low-cost and ease of implementation advantages. The methodology faced challenges related to software system creation, data collection and mobility detection. Despite these, the study demonstrates that Bluetooth RSSI data can effectively determine indoor paths with reasonable accuracy.
Experiments conducted in controlled indoor environments validated the system’s ability to detect mobility patterns accurately. Parameters such as data aggregation methods and normalisation significantly impacted the accuracy of detected paths. The study’s findings indicate that the proposed approach can effectively map indoor mobility without specialised hardware, relying solely on mobile devices and a custom application.
The authors conclude that while the system presents a promising solution for indoor mobility detection using Bluetooth RSSI, further research is necessary to improve accuracy and applicability in real-world scenarios. Future work will explore the impact of varying the number of stationary devices and the distance between them on detection accuracy. Additionally, real-world testing in clinical settings is planned to validate the approach’s effectiveness in operational environments.
A common scenario is where a beacon can be detected using the nRF Connect app on an Android device, but remains undetected on a Windows system, even though it is equipped with Bluetooth hardware.
This limitation is most evident when trying to detect and interact with Bluetooth LE devices that are not Human Interface Device (HID) class devices, such as keyboards and mice. These HID devices are readily supported and can connect effortlessly. However, most other Bluetooth LE devices do not show up by default on the Windows Bluetooth management interface. This is primarily because the native Bluetooth stack in Windows is not fully optimised to handle the variety of LE devices available in the market.
To overcome these limitations, developers and users need to implement custom applications using the Windows Bluetooth APIs. These applications act as a bridge, allowing Windows to recognise and interact with a broader range of Bluetooth LE devices.
For those looking to achieve the most reliable Bluetooth LE performance on Windows, especially for custom projects and advanced device interactions, using a Bluetooth LE dongle is the best approach. By connecting a LE dongle via USB, users can bypass many of the native Bluetooth limitations of Windows. These dongles come with their own drivers and management software, which are specifically designed to handle a wide array of Bluetooth LE protocols and device interactions. This setup not only enhances device compatibility but also boosts the reliability and range of Bluetooth communications.
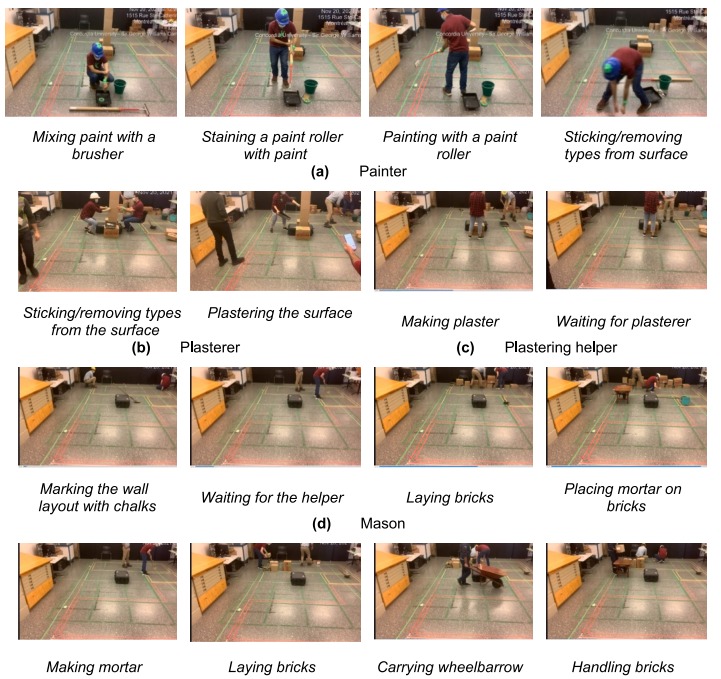
A new paper, authored by Mohammadali Khazen, Mazdak Nik-Bakht, and Osama Moselhi, introduces an innovative system for indoor construction sites, designed to simultaneously track workers’ locations, body orientations, and productivity states. The system, which integrates Real-Time Locating System (RTLS) data with a 4-Dimensional Building Information Model (BIM), employs three modules: workspace discovery, body orientation detection and productivity state identification.
The workspace discovery module maps workers’ locations onto the BIM, enhancing workspace management. The body orientation module, using Bluetooth Low Energy (BLE) beacons, identifies workers’ field of view, while the productivity state module leverages accelerometer data from body-mounted beacons to classify workers’ activities into direct work, support work, or idle states.
Experimental results demonstrate the system’s efficacy in laboratory settings, with orientation detection showing a mean error of less than 30° over eight minutes and productivity state identification achieving an average error of 14% and a maximum of 20%. These findings underscore the system’s potential to improve on-site management by providing real-time insights into workers’ activities, thereby addressing the limitations of manual observation methods.
The integration of RTLS with BIM and the innovative use of sensor data for orientation and activity classification represents a significant advancement in the field of construction site management, offering a promising tool for enhancing productivity and safety on indoor construction projects.