
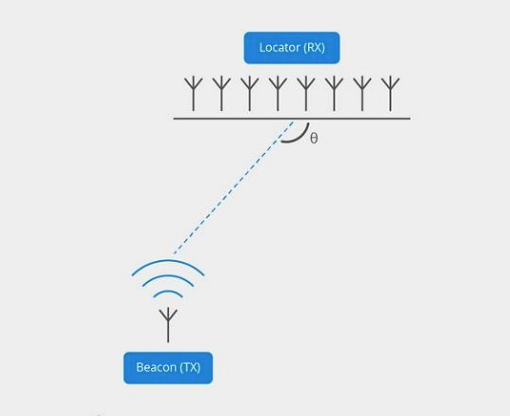
Bluetooth Angle of Arrival (AoA) uses the phase difference of the radio signal hitting multiple antenna to calculate the elevation and azimuth angles to the beacon.
The accuracy is affected by physical aspects and the way the signals are processed. It varies from the order of a few centimetres to about a metre.
Here are some tips to maximise AoA accuracy:
- Avoid metal objects close to the locators. Try getting better accuracy by adding boxing above locators to move them away from items such as metal beams.
- Try to arrange that you have locators on all sides of a beacon. You ideally need locators all around the beacon. Accuracy is poor when the angle between beacon and locator is very large. This includes outside the perimeter of the locators where the angles get progressively larger.
- The best, of the order of centimetres, accuracy is obtained when the beacon is close to a locator. If accuracy is particularly important, consider dropping the locators down with tall ceilings. Don’t drop too far as remember, from the last tip, accuracy is poor when the angle between beacon and locator is very large.
- For an x, y z location, the worst accuracy is on up-down z axis. This is because all the locators are usually placed at the same height.
- Accuracy is best when there’s line of sight between the beacon and locator. This favours the placing of locators on the ceiling/roof and beacons on top of items such as pallet loads.
- While the physical room usually can’t be changed, be aware when testing that an enclosed space such as an office has more reflections and hence less accuracy than, for example, a warehouse.
- For most systems, adding more locators in the same area produces more location angles that can be used to calculate a more accurate beacon position. Also try to stagger the locators so they are not in line. More data also means systems can also average the data to mitigate radio noise. However, more data means the location engine supports fewer beacons.
- Another way to average more data, without stressing the location engine, is to filter over time. However, this increases the latency when receiving location updates.
- Accuracy varies depending on the beacon orientation. The orientation that gives the best accuracy for one direction, say x, isn’t necessarily the best for y. While there’s usually nothing you can do about this, in some controlled scenarios you can arrange fix the beacon orientation to improve accuracy in a particular direction.
- Too many beacons, in the same area, advertising too regularly causes Bluetooth packet collisions and loss of radio signal reaching locators. Large beacon populations require a longer beacon Bluetooth periodic advertising period that also has the affect of allowing the system to support a larger maximum number of beacons.
- Accurate site and anchor measurement is important. Inaccurate initial measurement is a common cause of poor system accuracy. Use a laser measure. If you finding it difficult to measure the x, y location of a locator high up, fix a plumb bob line and measure the location at floor level.
Read about PrecisionRTLS™