Here’s a new official video of the Minew E8:
The thing sticking out the top is the battery slip. Pull and remove it to activate the beacon.
The E8 is small, thin (5mm), light (8g) and advertises iBeacon, Eddystone and acceleration.
iBeacon, Eddystone, Bluetooth, IoT sensor beacons, apps, platforms

Here’s a new official video of the Minew E8:
The thing sticking out the top is the battery slip. Pull and remove it to activate the beacon.
The E8 is small, thin (5mm), light (8g) and advertises iBeacon, Eddystone and acceleration.
When working with Machine Learning on beacon sensor data or indeed any data, it’s important to realise AI machine learning isn’t magic. It isn’t foolproof and is ultimately only as good as the data passed in. Because it’s called AI and machine learning, people often expect 100% accuracy when this often isn’t possible.
By way of a simple example, take a look at the recent tweet by Max Woolf where he shows a video depicting the results of the Google cloud vision API when asked to identify an ambiguous rotating image that looks like a duck and rabbit:
There are times when it thinks the image is a duck, other times a rabbit and other times when it doesn’t identify either. Had the original learning data included only ducks but no rabbits there would have been different results. Had there been different images of ducks the results would have been different. Machine learning is only a complex form of pattern recognition. The accuracy of what you get out is related to a) The quality of the learning data and b) The quality of the tested data when to try identification.
If your application of machine learning is safety critical and needs 100% accuracy, then machine learning might not be right for you.
Read about AI Machine Learning with Beacons
A common usecase for beacons is time and attendance management. This involves needing to know who has been where and for how long.
Our gateways have been used in education for automatically recording student registration. They have been particularly suitable in ‘open lab’ type scenarios where there’s not always staff around to record attendance. Beacons are given to students that are recorded by gateways. It’s also possible to have the gateways act as beacons so that smartphone apps can unlock things such as electronic teaching materials on a student-by-student basis.
Another usecase is personal tracking of time spent in places or on projects for expensing to clients. Again, this can be done accurately and automatically.
A further usecase we have come across is the use of our beacons on evidence-based policing. Police officers on the beat often have to account for how long they have spent at particular locations. An Android app carried by officers records beacons (location) and sends the data to a central server. This prevents the need for paper based processes to determine who has been where.
There’s ready made software available such as Seats Software and Calamari. However, we find that clients sometimes have more specific, yet simpler needs that don’t necessarily map well to ready-made solutions.
Consider our development services.
We have a new short video (4 mins 43 secs) showing the BeaconRTLS™ user interface and demonstrating the REST interface that can be used by external systems (best viewed fullscreen):
Aside from the unique aspect of mixing asset tracking and IoT sensing, you can see that BeaconRTLS™ has an unusually good UI compared to most enterprise software. Software used for business tends to be clunky with screen updates requiring full page refreshes. BeaconRTLS™ uses Material Design and uses latest asynchronous techniques such that everything is rendered in the web browser as opposed to at the server which makes screen updates smooth and flicker free. More importantly, relieving the server of rendering, continuously changing, ‘live view’ web pages frees up computing resources that are better used for processing incoming beacon advertising.
Read about BeaconRTLS™
The Singapore Space and Technology Association has partnered with Airbus to launch a HADR (Humanitarian Assistance and Disaster Relief) challenge. The objectives are to use latest technologies to aid rescue efforts.
Lee Wei Wen and Lee Wei Juin propose the use of iBeacon to display the GNSS locations of the rescuers with live updates of the rescue plan across different agencies:
As we previously posted, there’s currently a resurgence of the use of beacons in retail. A recent article from Fujitsu says Smart shopping malls thrill visitors, drive profit.
Beacons have been used for years now to trigger offers and information in-store. The beacon marketing ecosystem changed abruptly last November when Google abandoned Nearby smartphone notifications such that all notifications now need an app.
Fujitsu is promoting the merits of having a mall-wide rather than store specific apps. A so called ‘Smart Mall’ can still drive in-store sales through smartphone notifications while at the same time provide increased added value such as mall plans, wayfinding, product comparison and price comparison.
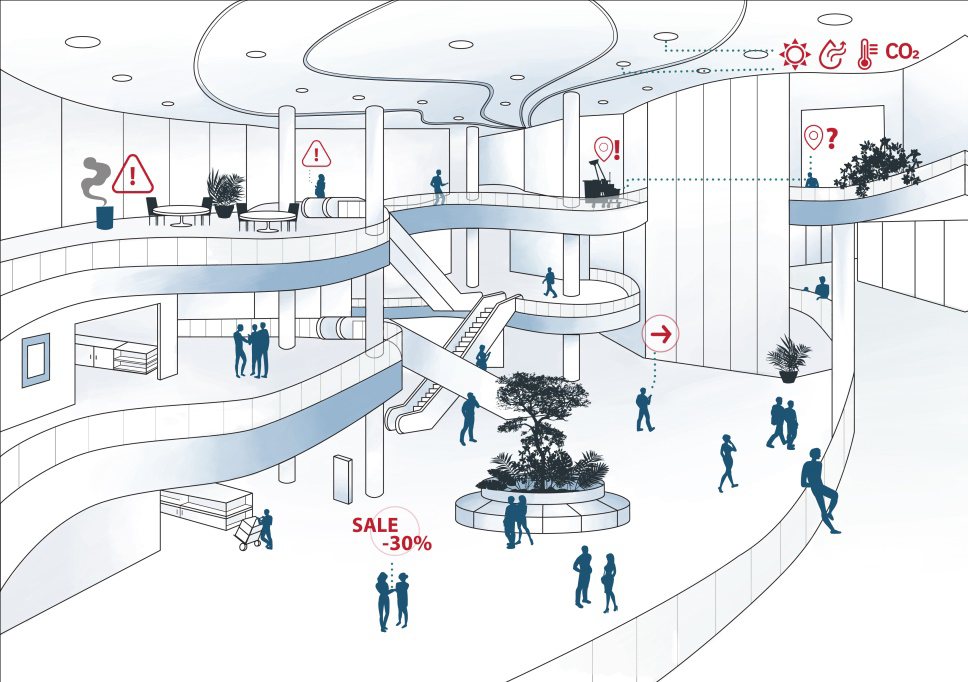
In some ways, getting visitors to download a mall app might be less of a hard sell than downloading an app for each store. This particularly benefits the smaller stores whose apps would never get downloaded.
The data flow can be two way. Shopper movements can be tracked across stores revealing common patterns to aid improvements to flow and identification of dead areas. Sensors can be used to locate and determine the state of equipment, for example letting maintenance staff know when supplies need replenishing. There are also usecases in security preparedness for shoppers, stores and mall security staff.
Explore the Benefits of Beacons
Read What are Beacons
The use of beacons is maturing. Instead of a product or service being all about beacons, it’s all about something else, usually more domain specific, with beacons providing a valuable adjunct that differentiates the offering.
An example is the Photosync backup and sync app.
It has location based ‘autotransfer’ option, using iBeacons, that allows the app to accurately trigger only at a particular location.
Once beacons are added to a product, it’s often the case that new unforeseen scenarios become evident.
We have a new video ‘Are You prepared?’, showcasing the benefits of using beacons in industry, IoT, 4IR and machine learning:
(55 secs, best viewed full screen)
Haltian has a useful IoT protocols comparison. It provides a comparison of TE Cat 1, LTE Cat M1, EC-GSM-IoT, NB-Io, Zigbee, SigFox, LoRa, Google Thread, Bluetooth LE and Wirepas Mesh.
Haltian say “It’s is a question of selecting the best-suited option for each use-case at hand”. One thing they don’t say is that the protocols are not mutually exclusive. For example, it’s increasingly the case that more than one protocol is used, one for short on-site distances and another for intra-site communication. WiFi/Ethernet also aren’t mentioned which are often a component of IoT solutions.
Smart Farming, also sometimes known as the ‘Third Green Revolution’, is the use of IT to improve profitability, gain efficiency, reduce costs through making better, more optimal decisions and better management control.
Kristoffer Rist Skøien Senior R&D Engineer at Nordic Semiconductor, the making of the SoC in most beacons, has a recent blog post on Feeding the World with Connected Crops. He explains how farmers need to move beyond current precision agriculture (PA) and site specific crop management (SSCM) into more advanced realtime sensing of things such as weather conditions in a specific spot, soil humidity, soil acidity, growth progress and other productivity metrics.
IoT can improve the productivity of farming to improve yields, aid with cost management, waste reduction and automation to create a more efficient and productive business. In the future, this might even combine with autonomous vehicles for watering, fertilising and pesticide application.
There’s need to process significant amounts of data using game-changing business analytics at scale and at speed. Simple feedback mechanisms as well as complex deep learning algorithms can be combined with other, external data sources such as weather, market data or data from other farms. Techniques include benchmarking, analytics, predictive modelling and prognostics to provide models to manage crop failure risk.
A relatively recent paper, Big Data in Smart Farming – A review, covers the issues of extracting meaningful data from farm sensors. It explains the process from sensing and monitoring, through analysis and decision making to intervention with the implications on the efficiency of the entire supply chain. The paper covers the whole ecosystem that extends far from the farm itself:
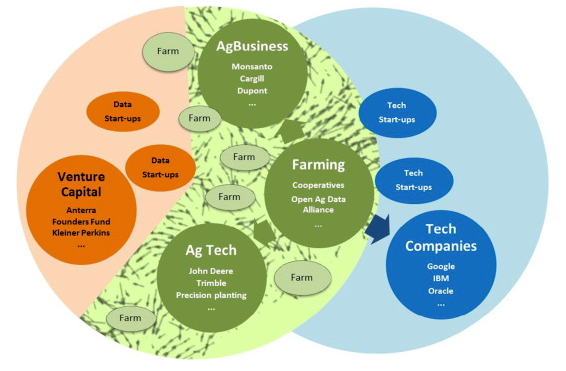
Smart Farming is still in an early development stage. Current implementations are custom, proprietary solutions that can are experimental and expensive. Solutions need to be affordable, especially for developing countries. However, as with Industry, the early innovators will inevitably gain the early benefits while the laggards will get further left behind.
One way to reduce costs is using standard and open technologies. Bluetooth and more specifically, Bluetooth mesh, offers a low power, low cost, standard way of collecting sensor data. Open software platforms such as OpenATK and initiatives such as FIspace should make solutions more accessible.
Read about Beacon Proximity and Sensing for the Internet of Things (IoT)