There’s some older but nevertheless useful research from Chung-Ang University, Seoul, Republic of Korea on A Measurement Study of BLE iBeacon and Geometric Adjustment Scheme for Indoor Location-Based Mobile Applications.
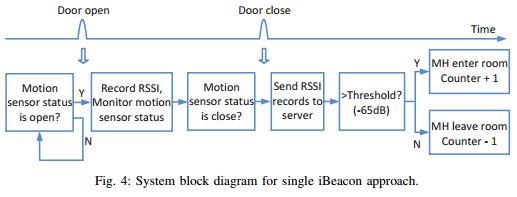
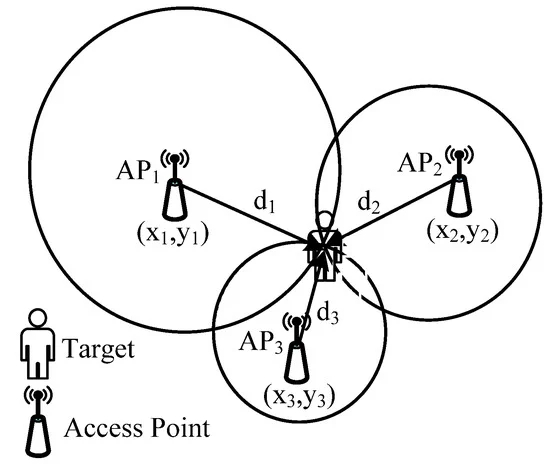
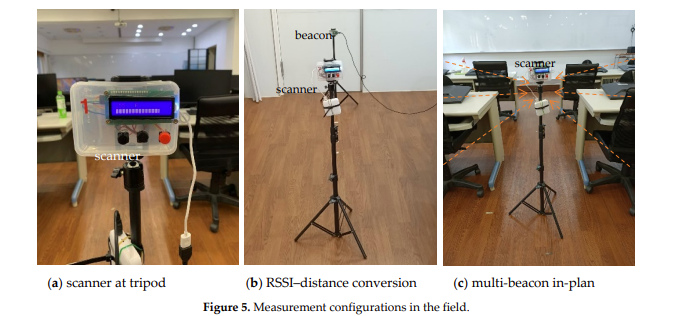
The research looks into detecting beacons on smartphones and using the received signal level (RSSI) to infer distance. The aim was to understand the nuances of the variation of signal to be able to create an automatic attendance checker system.
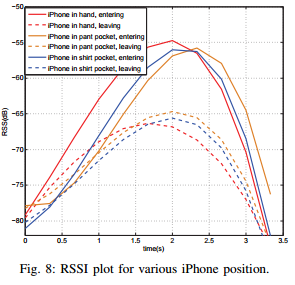
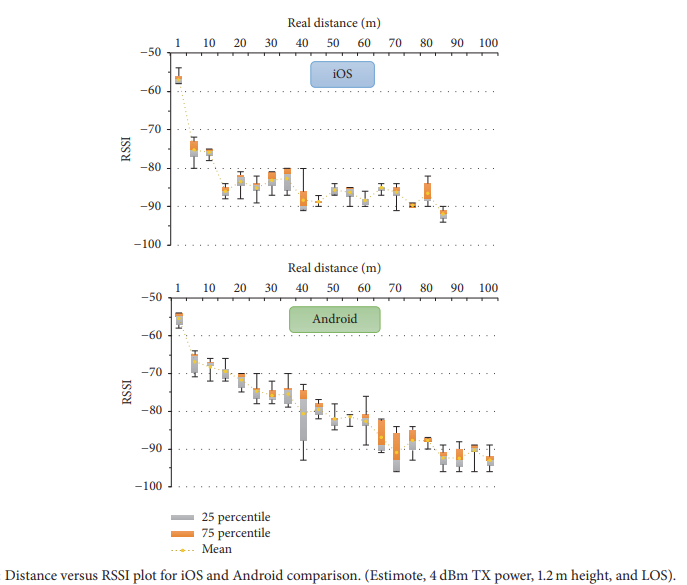
The researchers looked into the differences between iOS and Android phones, the affect of device placement height, differences between iBeacons from different manufacturers, the affect of reducing to minimum transmit (Tx) power, indoors versus outdoors and the affect of obstacles and WiFi.
iOS showed notably shorter maximum distances of 85 meters and the difference between the maximum distances of iOS and Android turned out to be very large. RSSI readings on Android phone decreased more gradually with distance while iOS showed a sudden drop in RSSI after 10 meters. RSSI readings on the Android platform had more temporal (stability) variation than iOS.
The researchers found it difficult to create a model that could take into account all the variations of RSSI. They said:
We believe that our work provides evidence on the challenges for designing an indoor localization system using commercial-off-the-shelf (COTS) iBeacons devices.
The researchers were trying to create a very accurate RSSI-based system that could use any smartphone and any beacon manufacturer. This isn’t possible. Instead, accuracy has to be compromised, hardware restricted or a different technique used.
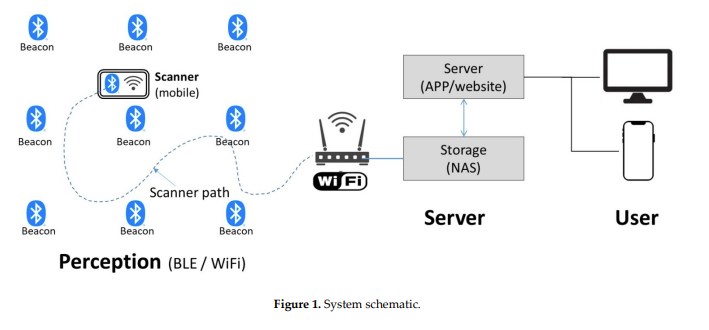
Most RSSI systems such as these use gateways rather than smartphones to perform Bluetooth scanning. This removes the smartphone model variability. Using only one beacon model reduces variability.
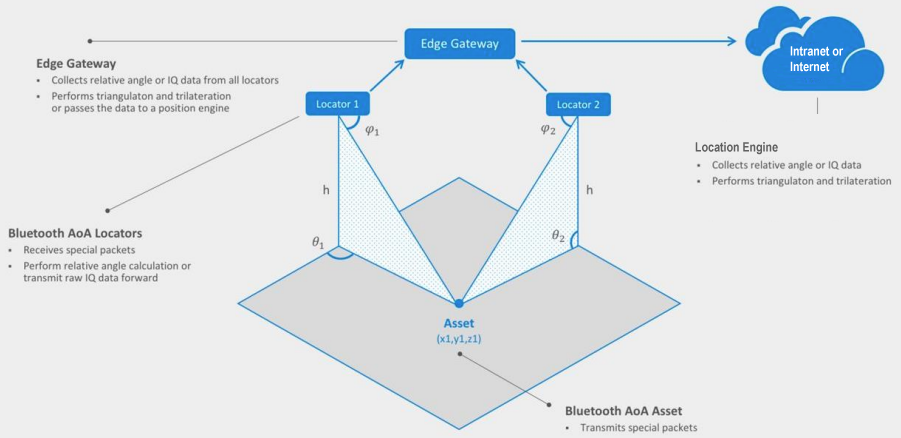
Newer Bluetooth Direction Finding provides a newer way than RSSI to obtain much better accuracy.